Last Updated on 2024-06-13 by BallPen
전기용량 리액턴스와 유도 리액턴스 공식을 유도하고 그 의미를 알아봐요.
리액턴스(reactance)는 교류전원에 축전기나 인덕터(또는 ‘코일’, ‘솔레노이드’, ‘유도기’라 불림)가 연결될 때 나타나는 저항의 성질(또는 반응저항)을 말해요.
축전기에서 발생하는 리액턴스 X_c를 ‘전기용량 리액턴스’ 또는 ‘용량성 리액턴스’라 부르고, 인덕터에서 발생하는 리액턴스 X_L를 ‘유도 리액턴스’ 또는 ‘유도성 리액턴스’라고 해요.
각각의 공식은 다음과 같이 주어지고, 저항의 단위인 \Omega을 사용합니다.
\tag{D1}
\begin{align}
X_c = {1 \over{2 \pi f C}}\\[15pt]
X_L = 2 \pi f L
\end{align}윗 식에서 f는 교류전원의 진동수, C는 축전기의 전기용량(capacitance), L는 인덕터의 유도계수(inductance)에요.
그럼 이제부터 (D1)과 (D2)식을 유도해보고 그 의미를 알아보겠습니다.
아래는 이번 글의 목차에요.
Contents
이 글에서 활용한 그림자료는 아래에서 다운받을 수 있어요. 키노트 파일이 원본 그림파일이고 파워포인트는 변환된거에요. 그래서 파워포인트 파일은 그림 일부가 깨져 보일 수도 있어요. 아울러 매스매티카 작업파일도 pdf로 함께 올려드립니다.
맥 키노트 파일 : reactance.key
파워포인트 파일: reactance.pptx
매스매티카 노트북 파일: reactance.pdf
1. 교류회로에서의 저항
리액턴스를 시작하기 전에 교류회로에서의 저항과 옴의 법칙을 간단히 알아봐요.
아래 [그림 1]은 저항 R이 교류전원과 연결된 것을 나타내고 있습니다.
![[그림 1] 저항 <span class="katex-eq" data-katex-display="false">R</span>이 교류전원과 연결되었습니다. 회로를 통과하는 전류가 <span class="katex-eq" data-katex-display="false">i</span>, 저항에 걸린 전압이 <span class="katex-eq" data-katex-display="false">v_R</span>이에요.](https://ballpen.blog/wp-content/uploads/2024/06/교류에서의-저항-1024x515.jpg)
그림과 같이 저항에 걸린 순간전압 v_R이 다음과 같이 사인꼴로 진동한다고 생각해봐요.
\tag{1-1}
v_R = V_p \sin \omega t여기서 V_p는 교류전원의 최대전압, \omega는 교류전원의 각진동수, t는 시간이에요.
이때 저항을 통과하는 순간전류 i는 다음과 같이 옴의 법칙을 적용하면 구할 수 있어요.
\tag{1-2}
\begin{align}
i &= {v_R \over {R}}\\[10pt]
&={{V_p \sin\omega t}\over{R}}\\[10pt]
&={V_p \over R} \sin\omega t
\end{align}그런데 위 (1-2)식의 마지막줄에서 V_p와 R은 모두 상수이므로, {V_p}\over{R}도 상수에요. 그래서 이것을 I_p로 표기하고 최대전류라고 부르기로 해요.
\tag{1-3}
I_p = {{V_p}\over{R}}그러면 저항을 통과하는 전류 (1-2)식은 다음과 같이 표현될거에요.
\tag{1-4}
i = I_p \sin \omega t(1-1)식과 (1-4)식을 통해 저항에 걸린 전압과 저항을 통과하는 전류는 모두 동일한 진동수 \omega로 진동하는 것을 알 수 있어요.
다만, (1-3)식에 따라 최대 전류 I_p는 저항 R이 커질수록 점점 작아집니다.
[저항에 걸린 전압과 전류 그래프]
지금까지 저항이 교류전원과 연결되었을 때 저항에 걸린 전압과 저항을 통과하는 전류에 대해 알아봤어요.
만일 저항값을 R=2~\Omega, , 교류전원의 최대 전압을 V_p = 6~\rm V, 교류전원의 각진동수를 \omega = 2~\rm rad/s라 할 때 (1-1), (1-4)식에 따라 저항에 걸린 순간전압과 순간전류는 아래와 같이 주어집니다.
\tag {1-5}
\begin{align}
v_R &= V_p \sin \omega t = 6 \sin 2 t\\[10pt]
i &= I_p \sin \omega t = 3 \sin 2 t
\end{align}이때 (1-5)식에 대한 전압과 전류 그래프를 매스매티카(mathematica)로 그려보면 다음과 같아요.
![[그림 2] 교류회로에서 저항에 걸린 전압과 전류 그래프](https://ballpen.blog/wp-content/uploads/2024/06/저항에-걸린-전압-전류-그래프-1024x553.jpg)
그래프로부터 전압 곡선의 최대 전압이 6 V이고, 전류곡선의 최대 전류는 3 A임을 알 수 있어요. 그리고 전압이 최대일 때 전류도 최대, 전압이 0일 때 전류도 0으로 나타나 두 곡선의 위상이 서로 같다는 것을 알 수 있습니다.
2. 교류회로에서의 축전기와 인덕터
이제부터 이 글의 목적인 리액턴스를 알아봐요.
리액턴스는 축전기나 인덕터가 교류전원에 연결되었을 때 나타나는 저항의 성질을 말합니다. 반대로 말하면 직류회로에서는 리액턴스는 나타나지 않아요.
먼저 축전기에 의한 전기용량 리액턴스부터 알아봐요.
1-1. 전기용량 리액턴스
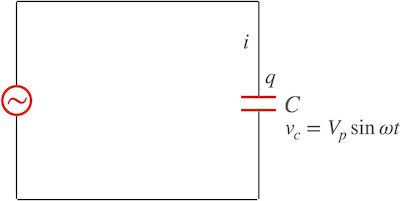
아래 [그림 3]은 교류전원에 전기용량 C인 축전기가 연결된 모습이에요.
![[그림 3] 축전기 <span class="katex-eq" data-katex-display="false">C</span>가 교류전원에 연결되었습니다. 어느 순간 <span class="katex-eq" data-katex-display="false">t</span>에 축전기에 모여진 순간 전하량을 <span class="katex-eq" data-katex-display="false">q</span>, 축전기를 통과하는 전류를 <span class="katex-eq" data-katex-display="false">i</span>, 축전기에 걸린 전압을 <span class="katex-eq" data-katex-display="false">v_c</span>라고 표기했습니다.](https://ballpen.blog/wp-content/uploads/2024/06/교류회로에서의-축전기-1024x515.jpg)
그림에 표기한 것처럼 축전기 양단에 걸린 교류 순간전압이 아래와 같다고 생각해봐요.
\tag{2-1}
v_c = V_p \sin \omega t그렇다면 축전기를 통과하는 순간 전류 i는 어떻게 될까요? 회로를 보면 저항이 없으므로 옴의 법칙에 의해 회로를 통과하는 전류는 무한대가 될 것 같아요.
그런데 정말 무한대로 전류가 흐를까요?
축전기 양단의 전압이 (2-1)식처럼 변한다는 것은 축전기에 저장된 전하량이 사인꼴 모양으로 충전과 방전한다는 의미에요. 어느 순간 t에서 축전기에 저장된 전하량을 q라고 해봐요. 그러면 순간전하량 q는 다음의 축전기 공식을 통해 구할 수 있어요.
\tag{2-2}
q=Cv_c이때 (2-2)식을 시간으로 미분해봐요. 그러면 전류 정의식을 통해 축전기를 통과하는 순간전류 i를 구할 수 있게 됩니다.
\tag{2-3}
\begin{align}
i={dq \over dt} &= {{dCv_c}\over{dt}}\\[10pt]
&=C{{dv_c}\over{dt}}\\[10pt]
&=C{d \over dt}(V_p \sin \omega t)\\[10pt]
&=\omega CV_p \cos \omega t
\end{align}여기서도 상수끼리의 곱은 또 다른 상수일 뿐이므로 치환해봐요. 즉 \omega, C, V_p는 모두 초기에 주어진 상수이므로, \omega C V_p를 최대 전류 I_p로 치환하겠습니다.
\tag{2-4}
I_p = \omega C V_p또한 (2-3)식의 마지막 줄에 주어진 \cos \omega t는 삼각함수의 덧셈 정리에 따라 \sin(\omega t + {{\pi}\over{2}})와 같아요.
\tag{2-5}
\begin{align}
\sin(\omega t + {\pi \over 2}) &= \sin \omega t \cos {\pi \over 2} + \cos \omega t \sin{\pi \over 2}\\[10pt]
&=\cos \omega t
\end{align}그러므로 (2-3)식의 가장 마지막 줄을 다시 정리하면 축전기를 통과하는 교류 순간 전류를 아래 (2-6)식처럼 쓸수 있어요.
\tag{2-6}
i = I_p \sin(\omega t + {\pi \over 2})한편 (2-4)식을 통해 축전기를 통과하는 최대 전류 I_p를 정의했는데요. 이 식을 옴의 법칙 I={{V}\over{R}}의 형태로 바꾸어 봐요. 그러면 다음과 같다는 것을 알 수 있어요.
\tag{2-7}
\begin{align}
I_p = {{V_p}\over{1/{\omega C}}}
\end{align}그러면 결국 윗 식의 분모에 있는 1/{\omega C}이 저항의 역할을 해야 한다는 것을 알 수 있어요.
이것은 아주 중요한 개념으로 [그림 3]의 회로에는 어떠한 저항도 존재하지 않지만 축전기가 교류 회로에 놓이게 되면 1/{\omega C}의 저항이 생긴다는 의미에요.
그래서 통상의 저항 R과 구분하기 위해 X_c라 표기하고, 명칭도 ‘전기용량 리액턴스’로 정하게 되었어요.
결국 전기용량 리액턴스는 아래 (2-8)식과 같이 주어집니다. 단위는 저항과 동일하게 \Omega입니다.
\tag{2-8}
\begin{align}
X_c = {1 \over {\omega C}} = {{1}\over{2 \pi f C}}
\end{align}여기서 \omega = 2 \pi f의 관계가 활용되었어요.
다시 말씀드리면 전기용량 리액턴스는 축전기가 교류전원과 연결될 때 나타나는 저항의 성질입니다. 이것이 재미있는 것은 통상의 저항 R은 전원 진동수와 무관하게 일정하지만, 전기용량 리액턴스는 (2-8)식처럼 전원의 진동수 f에 의존하여 달라집니다.
축전기의 전기용량이 0.2~\rm F인 경우, 교류전원의 진동수에 따른 전기용량 리액턴스는 다음과 같이 변해요.
![[그림 4] 교류전원 진동수 <span class="katex-eq" data-katex-display="false">f</span>에 따른 전기용량 리액턴스 <span class="katex-eq" data-katex-display="false">X_c</span>의 변화](https://ballpen.blog/wp-content/uploads/2024/06/교류전원-진동수에-따른-전기용량-리액턴스-1024x638.jpg)
전기용량 리액턴스 X_c는 교류전원의 진동수 f가 커질수록 점점 작아지는 것을 알 수 있어요. 즉, 전류가 더 잘 통해요.
[축전기에 걸린 전압과 전류 그래프]
참고로 축전기에 걸린 순간 전압과 순간 전류는 (2-1)식과 (2-6)식으로 주어진다고 말씀드렸어요.
만일 축전기의 전기용량이 C=0.2~\rm F, 교류전원의 최대 전압을 V_p = 6~\rm V, 교류전원의 각진동수를 \omega = 2~\rm rad/s라 할 때 (2-1), (2-6)식은 다음과 같이 표현될 거에요.
\tag{2-9}
\begin{align}
v_c &= V_p \sin \omega t = 6 \sin 2 t\\[10pt]
i &= (2 \times0.2\times 6) \sin(2t + {{\pi} \over {2}})=2.4\sin(2t + {\pi \over 2})
\end{align}그리고 그래프를 그려보면 아래와 같습니다.
![[그림 5] 교류회로에서 축전기에 걸린 전압과 전류 그래프](https://ballpen.blog/wp-content/uploads/2024/06/축전기에-걸린-전압-전류-그래프-1024x553.jpg)
여기서 중요한 것은 축전기에 걸린 전압이 최대일때 흐르는 전류는 0이고, 전압이 0일 때 전류는 최대라는 거에요. 즉 저항의 경우에는 전압과 전류의 위상이 동일한데, 축전기는 전압과 전류의 위상이 \pi \over 2만큼 어긋납니다.
1-2. 유도 리액턴스
아래 [그림 6]은 교류전원에 유도계수 L인 인덕터가 연결된 모습이에요.
![[그림 6] 인덕터 <span class="katex-eq" data-katex-display="false">L</span>이 교류전원에 연결되었습니다. 인덕터를 통과하는 전류를 <span class="katex-eq" data-katex-display="false">i</span>, 인덕터에 걸린 전압을 <span class="katex-eq" data-katex-display="false">v_L</span>라고 표기했습니다.](https://ballpen.blog/wp-content/uploads/2024/06/교류회로에서의-인덕터.jpg)
이번에는 그림에 표기한 것처럼 인덕터를 통과하는 교류 순간전류가 아래와 같다고 생각해봐요.
\tag{2-10}
i = I_p \sin \omega t그리고 인덕터에 걸린 순간전압 v_L을 함께 구해 봐요.
인덕터에 걸린 전압은 인덕터를 통과하는 전류의 시간변화율에 비례하는데요. 이때 비례상수가 유도계수 L에요. 식으로 표현하면 다음과 같습니다.
\tag{2-11}
\begin{align}
v_L &= L {{di}\over{dt}}\\
\end{align}윗 식에 (2-10)식을 대입하고 정리해 보세요. 그러면 다음과 같습니다.
\tag{2-12}
\begin{align}
v_L &= L {{d}\over{dt}} (I_p \sin \omega t)\\[10pt]
&= \omega L I_p \cos \omega t\\[10pt]
&=\omega L I_p \sin(\omega t + {{\pi}\over{2}})
\end{align}위 식에서도 (2-5)식의 관계를 활용해서 \cos을 \sin으로 바꾸었습니다.
한편 식에서 \omega, L, I_p는 모두 상수이므로, \omega L I_p를 최대 전압 V_p로 치환해봐요.
\tag{2-13}
V_p = \omega L I_p그러면 (2-12)식의 가장 마지막 줄을 정리하면 인덕터에 걸린 순간 전압은 아래 식으로 주어집니다.
\tag{2-14}
v_L = V_p \sin(\omega t + {{\pi}\over{2}})한편 (2-13)식을 통해 V_p를 정의했는데요. 이 식을 옴의 법칙 형태로 바꿔보면 다음과 같아요.
\tag{2-15}
\begin{align}
I_p = {{V_p}\over{\omega L}}
\end{align}그러면 위 식의 분모에 있는 \omega L이 저항의 역할을 해야 한다는 것을 알 수 있어요.
[그림 6]에서도 분명히 저항이 없는데요. 인덕터가 교류 회로에 놓이게 되면 \omega L의 저항이 생긴다는 의미입니다.
그래서 통상의 저항 R, 전기용량 리액턴스 X_c와 구분하기 위해 X_L로 표기하고, 명칭을 ‘유도 리액턴스’로 정하게 되었어요.
결국 유도 리액턴스는 아래 식과 같이 주어집니다. 단위는 저항과 동일하게 \Omega입니다.
\tag{2-16}
X_L = \omega L = 2 \pi f L유도 리액턴스도 전기용량 리액턴스와 유사하게 교류전원의 진동수 f에 의존하는데요. 다만 이 경우에는 서로 비례 관계를 갖습니다.
유도계수가 0.2~\rm H인 경우에 대해 이 관계를 그래프로 그려보면 다음과 같아요.
![[그림 7] 교류전원 진동수 <span class="katex-eq" data-katex-display="false">f</span>에 따른 유도 리액턴스 <span class="katex-eq" data-katex-display="false">X_L</span>의 변화](https://ballpen.blog/wp-content/uploads/2024/06/교류전원-진동수에-따른-유도-리액턴스-1024x642.jpg)
유도 리액턴스 X_L은 교류 전원의 진동수 f가 커질수록 점점 커지는 것을 알 수 있어요. 즉 전류가 잘 흐르지 못해요.
[인덕터에 걸린 전압과 전류 그래프]
만일 인덕터의 유도계수가 C=0.2~\rm H, 인덕터를 통과하는 최대 전류를 I_p = 6~\rm A, 교류전원의 각진동수를 \omega = 2~\rm rad/s라 할 때 (2-10), (2-14)식은 다음과 같이 표현될 거에요.
\tag{2-17}
\begin{align}
v_L &= (2 \times 0.2 \times 6) \sin(\omega t + {\pi \over 2}) = 2.4 \sin (\omega t + {\pi \over 2})\\[10pt]
i &= I_p \sin \omega t = 6 \sin 2 t
\end{align}그리고 그래프를 그려보면 아래와 같습니다.
![[그림 8] 교류회로에서 인덕터에 걸린 전압과 전류 그래프](https://ballpen.blog/wp-content/uploads/2024/06/인덕터에-걸린-전압-전류-그래프-1024x553.jpg)
여기서 중요한 것은 인덕터에 걸린 전압이 최대일 때 인덕터를 흐르는 전류는 0이고, 전압이 0일 때 전류는 최대라는 거에요. 즉 축전기와 유사하게 인덕터가 교류전원에 있게 되면 전압과 전류는 {{\pi}\over{2}}만큼 위상이 어긋납니다.
이상으로 전기용량 리액턴스와 유도 리액턴스 공식을 유도하고 그 의미를 알아봤습니다. 전기용량 리액턴스는 교류전원의 진동수와 반비례하고, 유도 리액턴스는 진동수와 비례합니다. 아울러 저항에 걸린 전압과 흐르는 전류는 위상이 동일하지만, 축전기와 인덕터의 경우에는 전압과 전류가 {{\pi}\over{2}}만큼 어긋나 있음을 꼭 기억하세요.