Last Updated on 2025-09-06 by BallPen
전기선속과 가우스 법칙의 개념을 함께 이해해 봐요.
가우스 법칙(Gauss’s law)이란 닫힌 면을 통과하는 전기선속 \phi는 그 면 내의 총 전하량 Q_{enc}에 비례하는 법칙을 말합니다.
여기서 Q_{enc}밑에 있는 ‘enc’는 ‘enclose’의 약자로써 닫힌 면 안쪽의 알짜 전하량을 의미합니다.
가우스 법칙을 식으로 표현하면 다음과 같아요. (D1)식은 가우스 법칙의 적분형이고, (D2)식은 미분형이에요.
\tag{D1}
\oint\vec E \cdot d\vec a = {{Q_{enc}}\over{\epsilon_0}}\tag{D2}
\nabla \cdot \vec E = {{\rho}\over{\epsilon_0}}이번 글에서는 전기선속이 무엇인지 부터 시작하여 (D1)과 (D2)의 가우스 법칙이 어떻게 만들어지는지에 대해 설명드립니다.
쉬운듯 하면서도 어려운게 가우스 법칙이에요.
아래는 이번 글의 목차입니다.
Contents
1. 전기선속(electric flux)
우리는 전기력선을 통해 어떤 공간에서의 전기장의 크기와 방향을 그림으로 표현할 수 있어요.
그런데 그렇게 그려진 전기력선이 어떤 가상의 면을 통과한다고 생각해보세요. 그때 그 면을 통과하는 전기력선의 갯수가 전기선속의 척도입니다. 전기선속은 때로 ‘전기다발’, ‘전기장 선속’이라고도 불려요.
이때 전기력선이 통과하는 면을 말씀드렸는데요. 그 면이 열린 경우가 있고 닫힌 경우가 있을 수 있어요.
이들 각각에서의 전기선속을 생각해 봐요.
1-1. 열린 면의 전기선속
아래 [그림 1]를 보세요.
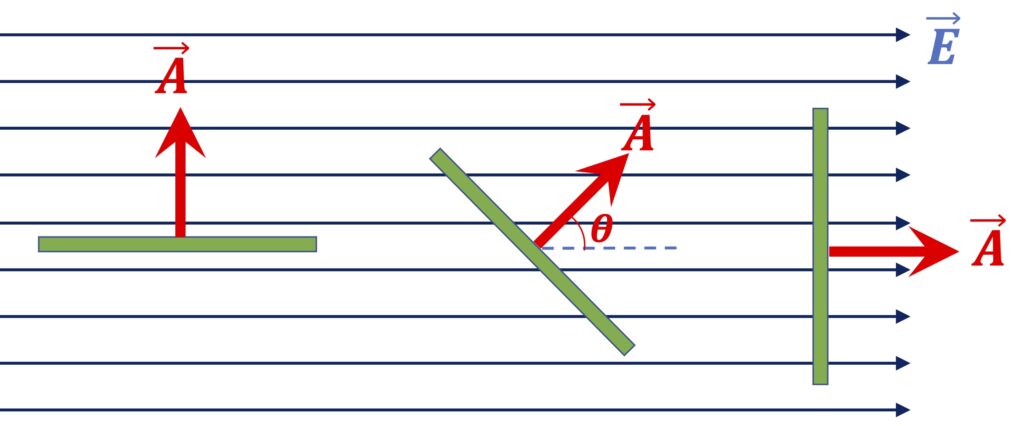
파랑색 화살표가 왼쪽에서 오른쪽으로 그려져 있는데요. 이것은 전기력선입니다. 전기력선 사이의 간격이 일정하므로 균일한 전기장 \vec E가 전기력선과 같은 방향을 향하고 있음을 알 수 있어요.
이 전기력선이 지나가는 경로에 녹색으로 그려진 열린 면이 2개 있는데요.
이 중에서 오른쪽 면을 보시면 면적이 A이므로 면벡터 \vec A는 빨강색 화살표처럼 면에 수직하게 오른쪽 방향을 향하고 있어요. 그래서 면벡터와 전기장벡터가 서로 평행해요.
[면벡터와 전기장벡터가 평행할 때]
전기선속은 면을 통과하는 전기력선 갯수의 척도라고 말씀드렸어요. 이런 관점에서 보면 오른쪽 면을 통과하는 전기력선의 수 \phi는 16개 임을 알 수 있습니다.
그런데 [그림 1]의 상황에서 전기장이 현재보다 2배 더 커지고 면적이 2배 더 넓어진다면 그 면을 통과하는 전기력선의 수는 몇개가 될까요?
네 맞습니다. 64개가 될거에요. 왜냐면 현재보다 전기력선이 2배 더 많아지고(면적 A를 통과하는 전기력선이 32개) 면적도 2배 더 커지기 때문이에요.
이와 같이 전기선속 \phi는 전기장 E와 가상의 면적 A에 비례합니다.
그래서 이 관계를 식으로 표현하면 아래와 같아요.
\tag{1}
\phi = EA![[그림 1] 전기장 <span class="katex-eq" data-katex-display="false">\vec E</span>가 일정할 때 면적 <span class="katex-eq" data-katex-display="false">\vec A</span>를 통과하는 전기선속. 면 벡터와 전기장 사이의 각도 <span class="katex-eq" data-katex-display="false">\theta</span>가 0으로 서로 평행하면 전기선속은 <span class="katex-eq" data-katex-display="false">EA</span>로써 최대가 됩니다.](https://ballpen.blog/wp-content/uploads/2023/12/Picture30-1024x599.jpg)
그런데 [그림 1]을 보시면 왼쪽 열린 면은 면적 A와 전기장 E가 오른쪽 면과 동일하게 유지되고 있음에도 전기선속이 8개 뿐이에요.
오른쪽 면은 전기선속이 16개 였는데 왜 왼쪽 면은 8개 뿐인거죠. 이 차이는 어디에서 왔을까요?
그 차이는 바로 면이 기울어져 있기 때문이에요. 결국 전기선속을 구하기 위해서는 전기장 벡터와 면 벡터사이의 각도도 고민해야 해요. 이 관계를 조금만 더 알아봐요.
[면 벡터와 전기장 벡터가 임의의 각을 가질 때]
아래 [그림 2]는 [그림 1]에서 보았던 파랑색 면을 옆에서 바라본 것이라고 생각하면 됩니다.
측면에서 본 것이니 면은 보이지 않고 면이 갖는 테두리만 보이는 거에요.
[그림 2]의 가장 오른쪽 녹색 선은 [그림 1]의 오른쪽 면에 대응해요.
이 경우에는 면벡터 \vec A와 전기장 \vec E가 평행하여 두 벡터 사이의 각도를 \theta라고 할 때 \theta=0^{\circ}가 됩니다. 이때 면을 통과하는 전기력선, 즉 전기선속이 6개임을 알 수 있어요.
그런데 면적의 크기는 동일한데 면이 \theta만큼 회전한 것이 중간 그림이에요. 이 경우 면을 통과하는 전기력선의 수가 4개로 줄었음을 알 수 있어요.
가장 왼쪽 그림은 \theta가 90^{\circ}에요. 이 경우 전기력선은 하나도 그 면을 통과할 수 없어요. 따라서 전기선속은 0이 됩니다.
이와 같이 전기장이 일정하고 면의 면적이 변하지 않더라도 전기장 벡터 \vec E와 면벡터 \vec A 사이의 각도 \theta에 따라 전기선속 \phi은 달라집니다.
이 관계를 감안하여 식(1)을 일반화하면 다음과 같이 표현할 수 있어요.
\tag{2}
\phi = \vec E \cdot \vec A = EA\cos \theta(2)식과 같이 전기선속 \phi는 전기장 벡터 \vec E와 면 벡터 \vec A의 스칼라곱으로 정의됩니다.
따라서 E와 A가 일정하게 유지되더라도 전기선속 \phi는 \theta에 따라서도 달라질 수 있어요.
\theta = 0^{\circ}인 경우 \phi = EA로써 최대가 되고, \theta=90^{\circ}인 경우 E와 A가 0이 아니더라도 \phi = 0이 됩니다.
2-2. 닫힌 면의 전기선속
이번에는 열린 면이 아니라 닫힌 면에서 전기선속이 어떻게 표현되는지 알아보겠습니다.
아래 [그림 3]은 균일한 전기장 안에 육면체가 있는데요. 그림과 같이 면에 의해 어떤 폐쇄된 공간이 만들어진 경우 그 면을 닫힌 면이라고 해요.
육면체는 총 6개의 수직한 면으로 구성되어 있으니 총 6개의 면벡터를 갖습니다. 그런데 [그림 3]에 모든 면벡터를 그리자니 그림이 복잡해서 단지 전기장과 평행한 \vec A_{left}와 \vec A_{right}만 그렸다는 것에 주의하세요.
![[그림 3] 닫힌면에서의 전기선속. 육면체의 각 면 벡터는 총 6개가 있으나 그중 전기장과 평행한 2개의 면 벡터만 표현하였습니다.](https://ballpen.blog/wp-content/uploads/2023/12/Picture50-1024x446.jpg)
이때 저 닫현진 육면체를 통과하는 전기선속은 어떻게 될까요? 바로 (2)식을 그대로 사용하면 되는데요. 모든 면을 통과하는 전기선속을 고려해야 하므로 총 6개의 항으로 풀어 쓸 수 있어요.
식으로 표현하면 아래 (3)식과 같습니다. 이때 적분이 나오는데요. 모든 닫힌 면을 통과하는 전기선속을 구한다는 의미에서 적분 기호 \oint가 사용됩니다.
\tag{3}
\begin{aligned}
\phi &= \oint \vec E \cdot d \vec a\\[10pt]
&= { \color {red} \vec E \cdot \vec A_{front}} + {\color {red}\vec E \cdot \vec A_{back}} + \vec E \cdot \vec A_{left} + \vec E \cdot \vec A_{right} + {\color{red}\vec E \cdot \vec A_{up}} + {\color{red}\vec E \cdot\vec A_{down}}\\[10pt]
&= \vec E \cdot \vec A_{left} + \vec E \cdot \vec A_{right}\\[10pt]
&=EA \cos 180^{\circ} + EA \cos 0^{\circ}\\[10pt]
&=-EA + EA\\
&=0
\end{aligned}(3)식에서 빨강색으로 표기한 부분은 모두 전기장 벡터 \vec E와 면 벡터 \vec A사이의 각도가 90^{\circ}이기 때문에 전기선속은 0이 됩니다. 예를 들어 \vec E \cdot \vec A_{front}는 EA \cos 90^{\circ} = 0이 되는 것이죠.
반면에 \vec E와 \vec A_{right}는 같은 방향으로 평행하므로 \theta = 0^{\circ}이고, \vec E와 \vec A_{left}는 반대방향으로 평행하므로 \theta = 180^{\circ}입니다.
그 결과 [그림 3]의 육면체를 통과하는 전기선속은 (3)식 처럼 0이 됩니다. 그런데 [그림 3]에 따르면 분명히 전기력선이 육면체를 통과하는데 전기선속이 0이라는 것이 의아할 수 도 있어요.
그런데 잘 보면 왼쪽으로 들어가서 오른쪽으로 그 선속이 그대로 나와요. 그래서 들어간 선속은 음수가 되고 나오는 선속은 양수가 되어 모두 합하면 0이 되는 것이죠.
결국 전기장이 있는 공간에서 닫힌 곡면을 통과하는 전기선속은 0입니다. 이때 주의할 것은 [그림 3]과 같이 육면체인 경우에만 선속이 0이 되는 것은 아니에요. 닫힌 면이 구면이든 찌그러진 곡면이든 [그림 3]처럼 전기장 내에 놓여있다면 무조건 전기선속은 0 입니다.
왜냐면 닫힌 면의 모양과 무관하게 들어간 전기력선은 무조건 나올테니까요. 단지 이해하기 쉽도록 육면체를 예로 든 것 뿐이에요.
2. 가우스 법칙(Gauss’s law)
지금까지 열린 면과 닫힌 면을 통과하는 전기선속에 대해 알아봤는데요. 이제부터는 이글의 목적인 가우스 법칙을 살펴보겠습니다.
가우스 법칙이란 닫힌 면을 통과하는 전기선속 \phi에 관한 법칙인데요. 위에서 말씀드렸듯이 전기장이 있는 공간에서 닫힌 면을 통과하는 전기선속은 0이라고 했으니 당연히 0이겠구나하고 생각할 거에요.
하지만 아래의 두 경우를 생각해 보세요.
닫힌 면 안에 전기장을 생성하는 원천전하가 있는 경우와 없는 경우입니다. 예를 들어 [그림 3]은 육면체의 닫힌 면 안에 전기장의 원천이 없는 경우에 해당해요. 이 경우 그 닫힌 면을 통과하는 전기선속은 0이었죠.
2-1. 닫힌 면 안에 원천 전하가 없을 때의 전기선속
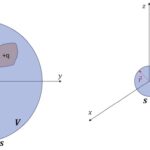
아래 [그림 4]에 두개의 그림이 있습니다. 두 그림 모두 전기장 안에 구형의 닫힌 면이 있는데요.
왼쪽 그림은 닫힌 면 밖에 전기장을 만들어내는 원천 전하 q가 있어요. 이 경우 닫힌 면을 통과하는 전기선속은 0이 됩니다. 왜냐면 위에서 말씀드렸듯이 닫힌 면으로 들어간 전기력선은 모두 그대로 나오니까요.
즉, 그림에서와 같이 6개의 전기력선이 들어가서 6개 모두 나오니 전기선속은 0인 거에요.
![[그림 4] 왼쪽은 닫힌 면 안에 전기장의 원천 전하가 없는 경우이고, 오른쪽은 닫힌 면 안에 전기장의 원천 전하가 있는 경우입니다.](https://ballpen.blog/wp-content/uploads/2023/12/Picture19-1024x467.jpg)
2-2. 닫힌 면 안에 원천 전하가 있을 때의 전기선속
하지만 [그림 4]의 오른쪽 그림의 경우 전기선속은 더이상 0이 아닙니다.
왜냐면 닫힌 면 안에 전기장을 만들어내는 원천전하가 존재하므로 닫힌 면을 통과하는 전기선속이 분명히 존재해요.
그림에서는 나가는 전기력선의 갯수가 24개이므로 전기선속은 24개가 되는 것입니다. 0이 아니에요.
2-3. 가우스 법칙 공식
정리하면 닫힌 면 안에 전기장을 만드는 원천전하가 없다면 전기선속은 0이고, 원천전하가 있다면 전기선속은 0이 아닙니다. 그렇다면 이 관계를 종합적으로 나타내는 수식을 어떻게 만들어 낼 수 있을까요?
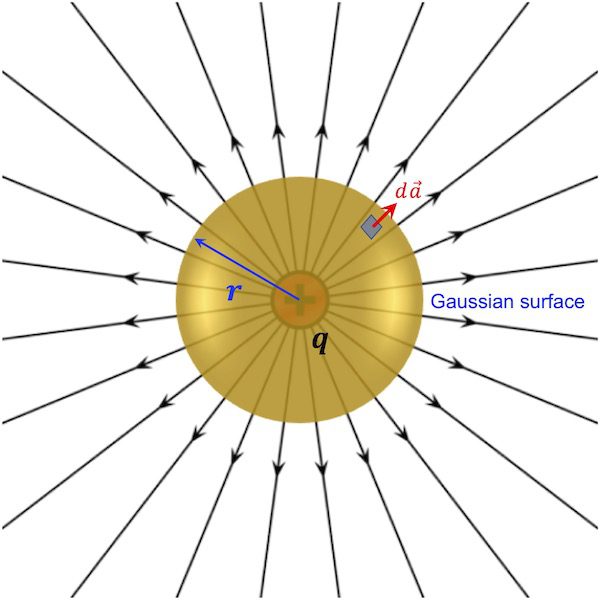
아래 [그림 5]와 같이 점전하 q가 있고 그 점전하를 둘러싼 가상의 닫힌 구면을 생각해보겠습니다. 그리고 그 구면을 통과하는 전기선속을 생각해 봐요.
이때 가상의 닫힌 구면을 전문적인 용어로 가우스 표면(Gaussian surface)이라고 불러요. 여기서 가우스는 Johann Carl Friedrich Gauß(1777~1855)로서 사람 이름입니다.
구면의 반지름은 r, 전기장을 만드는 원천전하의 전하량을 q, 구면의 미소 면적 요소를 d \vec a라고 하겠습니다.
![[그림 5] 가우스 법칙. 닫힌 면 안에 전하 <span class="katex-eq" data-katex-display="false">q</span>가 있을 때 그 면을 통과하는 전기장 선속은 <span class="katex-eq" data-katex-display="false">q / \epsilon_0</span>로 주어집니다.](https://ballpen.blog/wp-content/uploads/2023/12/Picture21-1024x1024.jpg)
그러면 점전하에 의한 전기장이 가우스 표면을 통과함으로써 갖게 되는 전기선속은 (3)식을 그대로 적용하여 다음 (4)식 처럼 구할 수 있습니다.
이때 전기장은 중심으로부터 떨어진 거리 r에만 의존하므로 구면좌표계의 미소 면적 요소를 적용하겠습니다.
\tag{4}
\begin{aligned}
\phi &= \oint \vec E \cdot d \vec a\\[10pt]
&=\oint{1 \over{4 \pi \epsilon_0}}{{q}\over{r^2}} \hat r \cdot d \vec a\\[10pt]
&=\int_0^{2 \pi} \int_0^\pi \Big({1 \over{4 \pi \epsilon_0}}{{q}\over{\cancel {r^2}}}\hat r\Big) \cdot (\cancel {r^2} \sin \theta d \theta d \phi \hat r) \\[10pt]
&= {{q}\over{4 \pi \epsilon_0}} \int_0^{2\pi} \int_0^{\pi} \sin \theta d \theta d \phi(\hat r \cdot\hat r)\\[10pt]
&={{q}\over{4 \pi \epsilon_0}} \int_0^{2 \pi} \Big[-\cos \theta \Big]_0^{\pi} d \phi\\[10pt]
&={{q}\over{4 \pi \epsilon_0}}\int_0^{2\pi} 2 d\phi\\[10pt]
&={{q}\over{\cancel{4\pi} \epsilon_0}} \cancel{4\pi}\\[10pt]
&={{q}\over{\epsilon_0}}
\end{aligned}그 결과 전기선속은 q / \epsilon_0 로 주어져 가우스 면이 전하를 품고 있는 경우 전기선속은 0이 아니며, 반면에 가우스 면이 전하를 품고 있지 않으면 q가 0이므로 전기선속은 0이 됩니다.
이것은 [그림 4]를 통해 설명드렸던 내용과 모두 일치하는 거에요.
이때 주의할 것은 (4)식에서의 q는 가우스 면 안에 있는 전하의 알짜 전하량입니다.
예를 들어 양전하 하나만 있는 경우에는 +q, 음전하 하나가 있는 경우 -q, 양전하와 음전하가 하나씩 있는 경우에는 아래 [그림 6]처럼 (+q)+(-q)가 되어 0이 됩니다.
![[그림 6] 양전하 <span class="katex-eq" data-katex-display="false">+q</span>와 음전하 <span class="katex-eq" data-katex-display="false">-q</span>가 가우스 면 안에 있으면 면을 나가는 전기선속과 들어오는 전기선속이 같아 총 전기선속은 0이 됩니다. 즉 가우스 면 안의 알짜 전하량이 0인 것과 같아요.](https://ballpen.blog/wp-content/uploads/2023/12/Picture70-1024x768.jpg)
따라서 가우스 면 안에 있는 전하의 알짜 전하량을 의미하는 것으로 일반화하기 위해 Q_{enc}로 표기하도록 하겠습니다.
또한 전기선속은 가상의 면을 통과하는 전기력선 갯수의 척도라고 해서 편의상 지금까지 갯수를 단위로 활용했는데요.
물리학에서는 전기선속의 단위로써 \rm{V \cdot m}를 사용합니다.
[가우스 법칙 적분형]
마지막으로 (4)식을 다시 쓰면 아래와 같아요. 그리고 이 식을 ‘가우스 법칙’이라고 부르며, 수식에 적분이 나오기 때문에 ‘가우스 법칙의 적분형’이라고도 부릅니다.
\tag{5}
\oint \vec E \cdot d\vec a = {{Q_{enc}}\over{\epsilon_0}}[가우스 법칙 미분형]
한편 발산정리(divergence theorem)를 적용하면 (5)식의 좌변은 전기장 발산의 부피적분으로 바꾸어 쓸 수 있습니다.
또한 가우스면 안쪽 공간의 부피전하밀도 \rho를 알고 있다면 (5)식 우변의 Q_{enc}는 부피전하밀도를 부피로 적분함으로써 구할 수도 있습니다.
이를 종합하면 다음과 같아요.
\tag{6}
\color{blue}\int_V (\nabla \cdot \vec E ) d \tau \color{black}= \oint \vec E \cdot d\vec a = {{Q_{enc}}\over{\epsilon_0}} = \color {blue} {1 \over {\epsilon_0}}\int_V \rho d \tau이때 파랑색 수식 두개를 서로 비교하면 다음의 관계도 성립하는데요. 수식에 미분이 나오기 때문에 ‘가우스 법칙의 미분형’이라고 부릅니다.
\tag{7}
\nabla \cdot \vec E = {{\rho}\over{\epsilon_0}}가우스 법칙은 가우스 면 안의 전하분포가 대칭성을 갖는 경우 전기장을 구하기 위해 많이 사용되는데요. 이와 관련된 예제는 다른 글에서 소개하겠습니다.