Last Updated on 2025-08-29 by BallPen
행렬의 고유값, 고유벡터를 구하는 방법과 그 의미를 알아봐요.
고유값 문제(eigenvalue problem)란 어떤 입력 벡터 \vec x를 정방행렬 A로 변환했을 때 결과 벡터가 입력 벡터 \vec x의 실수배 \lambda를 만족하는 경우, \lambda를 행렬 A의 고유값, \vec x를 \lambda에 대응하는 고유벡터라고 합니다.
이를 식으로 표현하면 다음과 같아요.
\tag{D1}
A \vec x = \lambda \vec x고유값 문제란 위 식을 만족하는 고유값 \lambda와 고유벡터 \vec x를 구하는 구하는 것을 말해요.
그럼 이제부터 고유값 문제 해법과 그 의미를 구체적으로 알아봐요.
아래는 이번 글의 목차입니다.
Contents
이 글에서 사용된 그림 파일은 아래 링크에서 다운 받으세요. 맥의 키노트로 작성되었어요.
맥 키노트 파일: eigenvalue_problem.key
1. 고유값 문제
1-1. 정의
일반적으로 벡터 \vec x에 선형 변환 정방행렬 A를 취하면 다른 벡터 {\vec x}~^{\prime}가 나옵니다. 식으로 쓰면 다음과 같아요.
\tag{1-1}
A \vec x = \vec x~^{\prime}이때 결과 벡터 \vec x^{\prime}은 입력 벡터 \vec x와는 서로 다른 방향과 크기를 갖게 됩니다.
하지만 어떤 벡터 \vec x는 다음의 경우를 만족하기도 해요.
\tag{1-2}
A \vec x = \lambda \vec x즉 어떤 벡터 \vec x를 행렬 A로 변환했을 때 원래 벡터 \vec x의 \lambda실수배로 나오는 거에요. 즉 변환 전 입력 벡터와 변환 후 결과 벡터의 방향이 보존되는 경우가 있다는 거에요.
이때 \lambda를 행렬 A의 고유값, \vec x를 \lambda에 대응하는 고유벡터라고 합니다.
고유값 문제란 바로 (1-2)식의 조건을 만족하는 고유벡터 \vec x와 고유값 \lambda를 구하는 것을 말해요.
1-2. 고유값 문제 의미
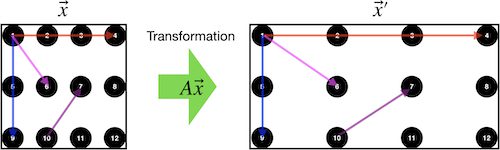
아래 [그림 1]의 왼쪽을 보면 검정색 정사각형이 있고, 그 안에 총 12개의 점이 있어요. 그런데 그 정사각형을 가로로 2배, 세로로 1배 확대하는 변환행렬 A를 취했더니 오른쪽 그림과 같이 직사각형으로 바뀌었어요.
![[그림 1] 고유값 문제 의미. 벡터 <span class="katex-eq" data-katex-display="false">\vec x</span>에 변환을 취하여 <span class="katex-eq" data-katex-display="false">A \vec x</span>를 해주면 <span class="katex-eq" data-katex-display="false">\vec x~^ \prime</span>가 됩니다. 이때 빨강색과 파랑색 벡터는 <span class="katex-eq" data-katex-display="false">A\vec x = 2 \vec x</span>와 <span class="katex-eq" data-katex-display="false">A \vec y = 1 \vec y</span>를 만족합니다.](https://ballpen.blog/wp-content/uploads/2024/09/고유값-문제-1024x308.jpg)
이때 왼쪽 정사각형 안에 있던 점도 오른쪽 그림의 위치로 바뀌게 될 것을 상상할 수 있을 거에요.
그림에서 1번 점을 원점이라고 했을 때 1번에서 4번을 향하는 빨강색 벡터와 1번에서 9번을 향하는 파랑색 벡터는 변환 전과 후에 벡터의 크기는 다를지라도 방향은 그대로 보존됨을 알 수 있어요.
이를 식으로 쓰면 다음 관계가 성립합니다. 이때 변환 전의 빨강색 벡터를 \vec x라 하고, 파랑색 벡터는 \vec y라고 할게요.
\tag{1-3}
\begin{aligned}
&A \vec x = 2 \vec x\\[10pt]
&A \vec y = 1 \vec y
\end{aligned}하지만 이 두벡터를 제외하고 1번에서 6번을 향하는 자주색 벡터와 10번에서 7번을 향하는 보라색 벡터 들은 모두 크기와 방향이 달라졌음을 알 수 있어요.
따라서 빨강색과 파랑색의 두 벡터만이 (1-2)식의 고유값 문제를 만족하고, 이때 2와 1을 행렬 A의 고유값이라고 합니다. 물론 \vec x와 \vec y는 고유벡터가 되는 거에요.
2. 고유값 문제 풀이 방법
그렇다면 고유값 문제를 어떻게 풀어내는지 그 방법을 알아봐요.
2-1. 고유값
먼저 고유값 \lambda를 구해봐요.이를 위해서는 우선 (1-2)식의 우변을 좌변으로 이항해봐요.
\tag{2-1}
(A \vec x - \lambda {\color{red}\vec x}) =0그리고 위 식에서 빨강색 벡터의 좌측에 단위행렬 I를 곱해도 식은 여전히 성립하죠.
\tag{2-2}
(A \vec x - \lambda {\color{red}I\vec x}) =0이때 단위벡터를 곱하는 이유는 벡터 \vec x를 공통인수로 밖으로 빼내려고 하는 거에요. 그러면 아래 식과 같이 괄호안의 수식을 행렬연산으로 묶을 수 있어요.
\tag{2-3}
(A - \lambda I)\vec x =0이때 중요한 것은 \vec x \ne 0조건하에서 위 식이 성립하도록 하는 어떤 조건이 필요해요. 이를 위해 위 (2-3)식의 양변에 A - \lambda I의 역행렬을 취해봐요.
\tag{2-4}
\begin{aligned}
(A - \lambda I)^{-1} (A - \lambda I) \vec x &= (A-\lambda I)^{-1}0\\[10pt]
I\vec x &= 0 \\[10pt]
\vec x&=0
\end{aligned}그 결과 위 식과 같이 \vec x가 0이 되어서는 안되는데, \vec x = 0이 되는 모순적 결과가 얻어져요. 그러므로 A - \lambda I의 역행렬이 존재해서는 안됩니다.
이때 역행렬이 존재하지 않기 위해서는 A - \lambda I의 행렬식이 0이 되어야 해요.
\tag{2-5}
|A-\lambda I | =0예를 들어 3×3 변환 행렬을 가정했을 때 (2-5)식은 다음과 같아요.
\tag{2-6}
\begin{vmatrix}
\begin{pmatrix}
a_{11} & a_{12} & a_{13}\\
a_{21} & a_{22} & a_{23}\\
a_{31} & a_{32} & a_{33}
\end{pmatrix}
-\lambda
\begin{pmatrix}
1 &0 & 0\\
0 & 1 & 0\\
0 & 0& 1
\end{pmatrix}
\end{vmatrix}
=0그리고 위 식을 정리하면 다음과 같죠.
\tag{2-7}
\begin{vmatrix}
a_{11} - \lambda & a_{12} & a_{13} \\
a_{21} & a_{22}-\lambda & a_{23}\\
a_{31} & a_{32} & a_{33}-\lambda
\end{vmatrix}
=0위 (2-7)식의 행렬식을 구하면 \lambda의 3차 방정식이 나올거에요. 그리고 그것을 풀면 고유값인 \lambda를 구할 수 있습니다.
2-2. 고유벡터
그렇다면 고유벡터는 어떻게 구하면 될까요?
이미 고유값 \lambda를 구했으니 그 값을 (1-2)식에 대입하여 고유벡터의 각 성분을 구하면 됩니다.
3. 고유값 문제 예제 : 고유벡터의 직교성
변환행렬 A가 다음과 같을 때 고유값과 고유벡터를 구해 보세요. 또한 각 고유벡터 사이의 직교 여부를 판정해보세요.
\tag{3-1}
A=
\begin{pmatrix}
2 & 0 & -1\\
0 & 2 & 0\\
-1 & 0 &2
\end{pmatrix}3-1. 고유값
우선 고유값을 구하기 위해서는 (2-5)식인 |A-\lambda I|=0을 적용하면 됩니다.
\tag{3-2}
\begin{vmatrix}
\begin{pmatrix}
2 & 0 & -1\\
0 & 2 & 0\\
-1 & 0 & 2
\end{pmatrix}
-\lambda
\begin{pmatrix}
1 &0 & 0\\
0 & 1 & 0\\
0 & 0& 1
\end{pmatrix}
\end{vmatrix}
=0위 식을 정리하면 다음과 같아요.
\tag{3-3}
\begin{aligned}
\begin{vmatrix}
2-\lambda & 0 & -1\\
0 & 2- \lambda & 0\\
-1 & 0 & 2-\lambda
\end{vmatrix}
&=(2 - \lambda)^3-(2-\lambda)\\[10pt]
&=(2 - \lambda)[(2-\lambda)^2 -1]\\[10pt]
&=(2-\lambda)(\lambda^2 -4 \lambda +3)\\[10pt]
&=(2-\lambda)(\lambda -3)(\lambda -1) =0
\end{aligned}따라서 위 식이 성립되기 위해서는 \lambda =2 또는 \lambda = 3 또는 \lambda =1이 만족되어야 합니다.
즉, 세개의 고유값이 구해지는데요. 크기순서로 \lambda_1 =1, \lambda_2 = 2, \lambda_3 =3으로 정하겠습니다.
3-2. 고유벡터
그럼 이제부터는 고유값에 대응하는 고유벡터를 구해봐요.
[고유값 = 1인 경우]
먼저 고유값 \lambda_1 =1인 경우에 대한 고유 벡터 \vec x_1이에요.
이를 위해 고유값을 A \vec x = \lambda \vec x인 (1-2)식에 대입해보세요. 그러면 아래와 같습니다.
\tag{3-4}
\begin{pmatrix}
2 & 0 & -1 \\
0 & 2 &0\\
-1 & 0 & 2
\end{pmatrix}
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}
=1
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}이제 위 식을 전개한 후 연립하여 풀어 벡터 \vec x_1의 각 성분 x_1,~x_2,~x_3을 구하면 됩니다. 여기서 \vec x_1는 고유벡터를, x_1은 고유벡터 \vec x_1의 한 성분을 나타냅니다. 헷갈리지 마셔요.
\tag{3-5}
\left \{
\begin{align*}
&2x_1 - x_3 = x_1\\
&2 x_2 = x_2\\
&-x_1 + 2x_3 = x_3
\end{align*}
\right.그 결과 x_1 = x_3를 만족하는 임의값 a면 되고, x_2 =0임을 알 수 있어요.
따라서 \lambda_1 = 1에 대응하는 고유 벡터 \vec x_1은 다음과 같습니다.
\tag{3-6}
\begin{align}
\vec x_1 =
\begin{pmatrix}
a \\
0\\
a
\end{pmatrix}
=a
\begin{pmatrix}
1\\
0\\
1
\end{pmatrix}
\end{align}이때 위 식에서 a는 아무 값이나 대입되어도 성립하지만, 고유벡터의 크기가 1이 되도록 벡터 정규화(vector normalization)를 하는 것이 일반적입니다.
이를 위해서는 행렬 안의 성분이 1, 0, 1이므로 이 벡터의 크기는 다음과 같을 거에요.
\tag{3-7}
\begin{align}
\sqrt{1^2 + 0^2 + 1^2} = \sqrt{2}
\end{align}그 결과 \sqrt{2}가 나오는데요. 이 값의 역수를 a로 정하면 고유벡터 \vec x_1의 크기는 1로 정규화됩니다.
그러므로 고유값 \lambda_1 =1에 대응하는 고유벡터 \vec x_1은 다음과 같습니다.
\tag{3-8}
\vec x_1 = {1 \over {\sqrt{2}}}
\begin{pmatrix}
1\\
0\\
1\\
\end{pmatrix}[고유값 = 2인 경우]
이번에는 고유값 \lambda_2 = 2인 경우에 대한 고유벡터 \vec x_2를 구해봐요.
먼저 고유값을 A \vec x = \lambda \vec x에 대입하세요.
\tag{3-9}
\begin{pmatrix}
2&0&-1\\
0&2&0\\
-1&0&2
\end{pmatrix}
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}
=2
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}그리고 위 식을 전개해서 고유벡터의 각 성분을 구하세요.
\tag{3-10}
\left \{
\begin{align*}
&2 x_1 - x_3 = 2 x_1\\
&2 x_2 = 2x_2\\
&-x_1 + 3x_3 = 2 x_3
\end{align*}
\right.그러면 x_1은 0이며 x_2는 임의의 숫자 a이면 되고, x_3는 0이 되어야 함을 알 수 있어요.
따라서 \lambda_2=2에 대응하는 고유벡터 \vec x_2는 다음과 같습니다.
\tag{3-11}
{\vec x_2 =
\begin{pmatrix}
0\\
a\\
0\\
\end{pmatrix}
=
a
\begin{pmatrix}
0\\
1\\
0\\
\end{pmatrix}}이번에도 벡터 \vec x_2의 크기가 1이 되도록 벡터정규화를 하면 되는데요. 각 성분의 크기가 0, 1, 0이므로 벡터의 크기는 아래와 같이 1이 됩니다.
\tag{3-12}
\sqrt{0^2 + 1^2 + 0^2} =1그러므로 이 값의 역수도 1이므로 (3-11)식의 a를 1로 두면 됩니다.
결국 고유값 \lambda_2=2에 대응하는 고유벡터 \vec x_2는 다음과 같습니다.
\tag{3-13}
\vec x_2 =
\begin{pmatrix}
0\\
1\\
0\\
\end{pmatrix}[고유값 = 3인 경우]
이번에는 고유값 \lambda_3=3인 경우에 대한 고유벡터 \vec x_3입니다. 먼저 고유값을 A \vec x = \lambda \vec x에 대입하세요.
\tag{3-14}
\begin{pmatrix}
2&0&-1\\
0&2&0\\
-1&0&2
\end{pmatrix}
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}
=3
\begin{pmatrix}
x_1\\
x_2\\
x_3
\end{pmatrix}그리고 윗 식을 전개해서 고유벡터의 각 성분을 구하면, x_1=-x_3을 만족하는 임의의 값 a이면 되고, x_2=0이 되어야 합니다.
결국 \lambda_3=3에 대응하는 고유벡터 \vec x_3는 다음과 같습니다.
\tag{3-15}
\begin{align}
\vec x_3 =
\begin{pmatrix}
a\\
0\\
-a\\
\end{pmatrix}
= a
\begin{pmatrix}
1\\
0\\
-1\\
\end{pmatrix}
\end{align}그리고 벡터 정규화를 하면 a={1 \over \sqrt{2}}이 되어야 벡터 \vec x_3의 크기가 1이 됩니다.
따라서 \lambda_3=3에 대응하는 고유벡터 \vec x_3는 다음과 같습니다.
\tag{3-16}
\vec x_3 =
{1 \over \sqrt{2}}
\begin{pmatrix}
1\\
0\\
-1\\
\end{pmatrix}3-3. 고유벡터의 직교성
지금까지 주어진 행렬 A에 대한 고유값과, 그 고유값에 대응하는 고유벡터들을 아래와 같이 구했어요.
\tag{3-17}
\vec x_1 = {1 \over \sqrt{2}}
\begin{pmatrix}
1\\
0\\
1\\
\end{pmatrix}
,~~~\vec x_2 =
\begin{pmatrix}
0\\
1\\
0\\
\end{pmatrix}
,~~~\vec x_3=
{1 \over \sqrt{2}}
\begin{pmatrix}
1\\
0\\
-1\\
\end{pmatrix}그런데 이 벡터들은 서로 수직한 특성을 갖고 있는 것으로 알려져 있어요. 그래서 이번에는 이 벡터들의 직교성에 대해 알아보겠습니다.
우선 각 벡터 화살표를 매스매티카로 그려보면 [그림 2]와 같습니다. 참고로 매스매티카 코드는 아래를 참고해주세요.

![[그림 2] 고유값 문제 해법을 통해 구한 고유벡터는 서로 직교합니다.](https://ballpen.blog/wp-content/uploads/2024/09/벡터-화살표-직교성-676x1024.jpg)
벡터들 사이의 직교성을 알기 위해서는 벡터의 내적을 활용하면 돼요. 만일 두 벡터가 서로 직교한다면 벡터의 내적은 0이 될거에요.
먼저 첫번째와 두번째 고유벡터 사이의 내적입니다.
\tag{3-18}
\begin{aligned}
\vec x_1 \cdot \vec x_2 &= {x_1}^T x_2\\
&={1 \over \sqrt{2}}
\begin{pmatrix}
1&0&1
\end{pmatrix}
\begin{pmatrix}
0\\
1\\
0
\end{pmatrix}\\
&=0
\end{aligned}
이번에는 두번째와 세번째 고유벡터 사이의 내적입니다.
\tag{3-19}
\begin{aligned}
\vec x_2 \cdot \vec x_3 &= {x_2}^T x_3\\
&=
\begin{pmatrix}
0&1&0
\end{pmatrix}
\begin{pmatrix}
1\\
0\\
-1
\end{pmatrix}
{1 \over \sqrt{2}}\\
&=0
\end{aligned}
같은 방식으로 첫번째와 세번째 고유벡터 사이의 내적입니다.
\tag{3-20}
\begin{aligned}
\vec x_1 \cdot \vec x_3 &= {x_1}^T x_3\\
&=
{1 \over \sqrt{2}}
\begin{pmatrix}
1&0&1
\end{pmatrix}
\begin{pmatrix}
1\\
0\\
-1
\end{pmatrix}
{1 \over \sqrt{2}}\\
&=0
\end{aligned}
그 결과 모든 고유벡터 사이의 내적이 0이므로 서로 직교함을 알 수 있어요.