Last Updated on 2025-08-23 by BallPen
단위벡터로부터 방향코사인의 정의와 의미를 알아보겠습니다.
방향코사인 (direction cosine)이란 단위 벡터를 양의 x축, 양의 y축, 양의 z축으로부터의 각도를 이용하여 표기하는 또 하나의 방법을 말합니다.
기초적인 삼각함수만 알고 있으면 아주 쉽게 이해할 수 있어요.
아래는 이번 글의 목차입니다.
1. 단위 벡터
방향코사인 개념을 이해하기 위해서는 우선 벡터와 단위 벡터를 알아야 합니다. 이에 대해 간단히 복습을 해보겠습니다.
1-1. 벡터
벡터는 기본적으로 크기와 방향을 갖는 양입니다.
예를 들어 3.0 \hat x의 벡터가 있을 때 3.0은 벡터의 크기이고 \hat x는 벡터의 방향이 x방향임을 나타냅니다.
같은 방식으로 y방향으로 크기가 4.0인 벡터는 4.0 \hat y로, z방향으로 크기가 5.0인 벡터는 5.0 \hat z로 표기하죠.
벡터는 서로 합해질 수 있어요. 그것을 벡터의 덧셈이라 합니다.
위에서 예로 들었던 세 벡터를 하나로 합해 볼까요. 합해진 벡터를 \vec A라고 한다면 아래 (1)식과 같이 표기할 수 있어요.
\begin{align}
\tag{1}
\vec A &= A_x \hat x + A_y \hat y + A_z \hat z \\[8pt]
&=3.0\hat x + 4.0 \hat y + 5.0 \hat z
\end{align}
또한 (1)식으로 주어진 벡터를 그림으로 나타내면 아래 [그림 1]의 검정색 화살표로 표현할 수 있습니다.
![[그림 1] (1)식에 주어진 벡터 <span class="katex-eq" data-katex-display="false">\vec A</span>를 검정색 화살표로 나타내었습니다.](https://ballpen.blog/wp-content/uploads/2022/02/Picture1-1024x982.png)
1-2. 단위벡터
(1)식에 주어진 벡터 \vec A는 크기 | \vec A|와 방향 정보를 갖는 단위벡터 \hat A가 결합된 형태로도 표기할 수 있어요. 아래 (2)식 처럼요.
\tag{2}
\vec A = |\vec A| \hat A그렇다면 (1)식에 주어진 벡터의 형식을 (2)식처럼 어떻게 바꿀 수 있을까요? 우선 벡터의 크기 |A|부터 구해봐요.
벡터의 크기는 각 성분의 크기값을 제곱하여 합한 후 제곱근을 구하면 됩니다. 아래 (3)식과 같이 숫자 7.1 이 (1)식에서 주어진 벡터 \vec A의 크기입니다.
\begin{align}
\tag{3}
|\vec A| &= \sqrt{A_x^2 + A_y^2 + A_z^2}\\[8pt]
&=\sqrt{3.0^2 + 4.0^2 + 5.0^2}\\[8pt]
&=7.1
\end{align}
이번에는 단위벡터 \hat A를 구해보도록 하겠습니다. 이를 구하기 위해서는 (2)식을 아래 (4)식과 같이 바꿀 수 있을거에요.
\tag{4}
\hat A = {{\vec A}\over{|\vec A|}}이 식에서 \vec A는 (1)식으로 이미 주어져 있고, |\vec A|는 (3)식을 통해 이미 구했습니다. 그러므로 그 값들을 대입하면 \hat A를 구할 수 있게 됩니다.
\begin{align}
\tag{5}
\hat A &= {{\vec A}\over{|\vec A|}}\\[8pt]
&= {{A_x \hat x + A_y \hat y + A_z \hat z}\over{|\vec A|}}\\[8pt]
&={A_x\over{|\vec A|}}\hat x + {A_y \over |\vec A|}\hat y + {A_z \over{|\vec A|}}\hat z\\[8pt]
&={3.0\over7.1}\hat x + {4.0 \over 7.1}\hat y + {5.0 \over{7.1}}\hat z\\[8pt]
&=0.42 \hat x + 0.56 \hat y + 0.70 \hat z
\end{align}
이제 비로소 (1)식으로 주어진 벡터 표기를 (2)식과 같이 할 수 있게 되었습니다.
\begin{align}
\tag{6}
\vec A &= |\vec A| \hat A\\[8pt]
&=7.1(0.42 \hat x + 0.56 \hat y + 0.70 \hat z)
\end{align}
(6)식에서 괄호안에 있는 단위벡터는 크기가 1.0이고 방향은 \vec A의 방향과 동일합니다. 그렇다면 정말 이 단위벡터의 크기가 1.0이 나올까요? 단위벡터의 크기를 구해 보겠습니다.
크기를 구하는 방법은 (3)식의 방식을 그대로 적용하면 되요.
\begin{align}
\tag{7}
|\hat A| &= \sqrt{\hat A_x^2 + \hat A_y^2 + \hat A_z^2}\\[8pt]
&=\sqrt{0.42^2 + 0.56^2 + 0.70^2}\\[8pt]
&=1.0
\end{align}
정말 단위벡터의 크기가 1.0이 됨을 알 수 있습니다.
![[그림 2] 벡터 <span class="katex-eq" data-katex-display="false">\vec A</span>와 단위벡터 <span class="katex-eq" data-katex-display="false">\hat A</span>를 각각 검정색과 빨강색 화살표로 나타내었습니다. 두 벡터의 방향은 서로 같습니다. 벡터 <span class="katex-eq" data-katex-display="false">\vec A</span>의 크기 <span class="katex-eq" data-katex-display="false">|\vec A|</span>는 검정색 화살표의 길이를 의미하고, 단위벡터의 크기는 (7)식에서와 같이 1이 됩니다.](https://ballpen.blog/wp-content/uploads/2022/02/Picture2-1024x989.png)
[그림 2]는 \vec A와 단위벡터 \hat A의 모습을 검정색과 빨강색 화살표로 나타낸 것입니다.
2. 방향코사인 (방향여현)
이제부터 이번 글의 주제인 방향코사인을 이야기 하겠습니다. 방향코사인은 때로 방향여현으로 불리기도 합니다.
2-1. 방향코사인 정의
방향코사인이란 단위벡터를 표기하는 또 다른 방법으로 이해하시면 좋습니다.
앞서 단위벡터에 대해 여러 이야기를 했는데요. 그 중에서 (5)식이 단위벡터를 구하는 내용이었습니다. 그 내용을 다시 쓰면 아래와 같습니다.
\begin{align}
\tag{8}
\hat A &= {{\vec A}\over{|\vec A|}}\\[8pt]
&= {{A_x \hat x + A_y \hat y + A_z \hat z}\over{|\vec A|}}\\[8pt]
&={A_x\over{|\vec A|}}\hat x + {A_y \over |\vec A|}\hat y + {A_z \over{|\vec A|}}\hat z\
\end{align}
즉 벡터를 벡터의 크기로 나누어 단위벡터를 구하는 거죠.
이 말은 (8)식의 세번째 줄과 같이 각 방향 성분의 크기를 벡터의 크기로 나누는 것과 같습니다. 예를 들어 벡터 \vec A의 x방향 성분의 크기가 A_x인데요. 이 값을 벡터 \vec A의 크기 |\vec A|로 나누는 겁니다. 동일한 방식으로 y와 z방향 모두 적용됩니다.
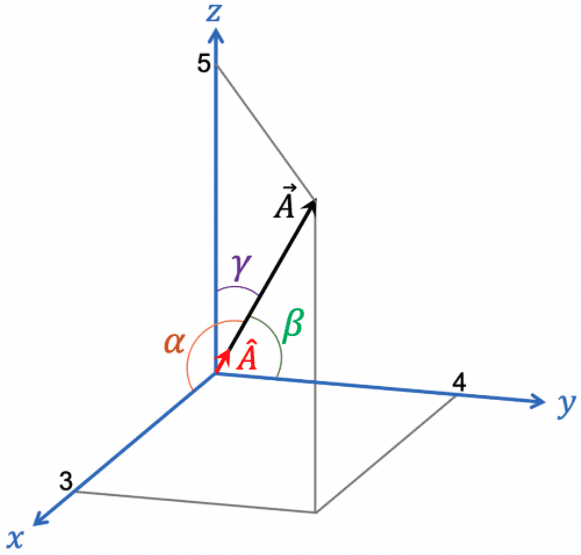
한편, 아래 [그림 3]은 벡터 \vec A와 양의 x축, 양의 y축, 양의 z축 사이의 각도를 각각 \alpha, \beta, \gamma로 나타낸 그림인데요.
![[그림 3] 방향코사인 정의. 벡터 <span class="katex-eq" data-katex-display="false">\vec A</span>와 양의 <span class="katex-eq" data-katex-display="false">x</span>축, 양의 <span class="katex-eq" data-katex-display="false">y</span>축, 양의 <span class="katex-eq" data-katex-display="false">z</span>축 사이의 각도를 각각 <span class="katex-eq" data-katex-display="false">\alpha</span>, <span class="katex-eq" data-katex-display="false">\beta</span>, <span class="katex-eq" data-katex-display="false">\gamma</span>라 할 때 이 각도에 코사인을 취한 것을 방향코사인이라 합니다.](https://ballpen.blog/wp-content/uploads/2022/02/Picture3-1024x991.png)
이 그림을 보시면, 예를 들어 (8)식의 세번째 줄 세번째 항인 {{A_z}\over{|\vec A|}}를 다른 형식으로 표현한다면 어떻게 표현할 수 있을까요?
삼각함수에서 코사인이란 직각삼각형에서 빗변과 밑변의 길이의 비율을 뜻합니다. 즉 \cos \theta = {{밑변}\over{빗변}}이 되는 것이죠.
이 관계를 활용하면 벡터 \vec A의 크기인 |\vec A|가 빗변의 길이로, z축 방향의 크기인 A_z는 밑변의 길이로 대응시킨다면 다음과 같이 표현할 수 있습니다.
\tag{9}
\begin{align}
{{A_z}\over{|\vec A|}} = \cos \gamma
\end{align}동일한 방식으로 x축과 y축을 모두 생각하면 다음 식도 성립합니다.
\tag{10}
\begin{align}
{{A_x}\over{|\vec A|}} = \cos \alpha,~~~{{A_y}\over{|\vec A|}} = \cos \beta
\end{align}결국 어떤 벡터의 단위 벡터는 아래와 같이도 표현할 수 있습니다.
\begin{align}
\tag{11}
\hat A &= {{\vec A}\over{|\vec A|}}\\[8pt]
&= {{A_x \hat x + A_y \hat y + A_z \hat z}\over{|\vec A|}}\\[8pt]
&={A_x\over{|\vec A|}}\hat x + {A_y \over |\vec A|}\hat y + {A_z \over{|\vec A|}}\hat z\\[8pt]
&=(\cos \alpha) \hat x + (\cos \beta) \hat y + (\cos \gamma) \hat z
\end{align}
이와 같이 단위 벡터의 각 방향 성분이 코사인으로 표기된다고 하여, 이를 방향코사인 또는 방향여현이라고 합니다.
2-2. 방향코사인 의미
단위벡터의 크기는 1이 되어야 합니다.
이를 알아보기 위해 우리는 이미 (5)식을 이용하여 단위벡터를 구한 후, (7)식을 이용하여 그 크기를 구했더니 정말 1이 나온다는 것을 확인했습니다.
따라서 (11)식에 방향코사인으로 표기된 단위벡터의 크기도 1이 되어야 합니다. 결국 다음의 관계가 성립한다는 의미가 되는 것이죠.
\tag{12}
\begin{align}
\sqrt{\cos^2 \alpha + \cos^2 \beta + \cos^2 \gamma} =1\\
\end{align}그러므로
\tag{13}
\begin{align}
\cos^2 \alpha + \cos^2 \beta + \cos^2 \gamma =1
\end{align}이 성립합니다.
결국 방향코사인 개념을 이용하면 어떤 벡터가 놓여진 각도를 구할 수 있어 편리하게 사용할 수 있습니다.
3. 방향코사인 구하는 문제 풀이
(예제1) \vec B = -4 \hat x + 2 \hat y + 3 \hat z로 주어진 벡터가 있다. 이 벡터의 방향코사인 성분들을 구하여라.
(풀이) 수식으로는 (11)식을 이용하여 아래와 같이 정리할 수 있습니다.
\begin{align}
\tag{14}
\hat B &= {{\vec B}\over{|\vec B|}}\\[8pt]
&= {{B_x \hat x + B_y \hat y + B_z \hat z}\over{|\vec B|}}\\[8pt]
&={B_x\over{|\vec B|}}\hat x + {B_y \over |\vec B|}\hat y + {B_z \over{|\vec B|}}\hat z\\[8pt]
&=(\cos \alpha) \hat x + (\cos \beta) \hat y + (\cos \gamma) \hat z
\end{align}
이 식을 이용하기 위해서는 우선 벡터의 크기 |\vec B|를 구해야 합니다.
\begin{align}
\tag{15}
|\hat B| &= \sqrt{\hat B_x^2 + \hat B_y^2 + \hat B_z^2}\\[8pt]
&=\sqrt{-4^2 + 2^2 + 3^2}\\[8pt]
&=\sqrt{29}
\end{align}
그리고 다시 (14)식을 이용하여 방향코사인을 구하면 아래와 같습니다.
\begin{align}
\tag{16}
\hat B &= {{\vec B}\over{|\vec B|}}\\[8pt]
&= {{B_x \hat x + B_y \hat y + B_z \hat z}\over{|\vec B|}}\\[8pt]
&={B_x\over{|\vec B|}}\hat x + {B_y \over |\vec B|}\hat y + {B_z \over{|\vec B|}}\hat z\\[8pt]
&=(\cos \alpha) \hat x + (\cos \beta) \hat y + (\cos \gamma) \hat z\\[8pt]
&={{-4}\over{\sqrt{29}}} \hat x + {{2}\over{\sqrt{29}}} \hat y + {{3}\over{\sqrt{29}}}\hat z
\end{align}
다시 한번 더 강조하면 방향코사인은 단위벡터를 표기하는 다른 표현일 뿐입니다.
(예제2) 어떤 벡터의 단위벡터가 \hat C = (1/2) \hat x + (1/\sqrt{2}) \hat y + (1/2) \hat z 로 주어졌다. 이 벡터가 x축, y축, z축과 이루는 각도를 구하여라.
(풀이) 다음과 같이 정리할 수 있습니다.
\begin{align}
\tag{17}
\hat C &= (\cos \alpha) \hat x + (\cos \beta) \hat y + (\cos \gamma) \hat z\\[8pt]
&={{1}\over{2}} \hat x + {{1}\over{\sqrt{2}}} \hat y + {{1}\over{2}}\hat z
\end{align}
그러므로 \alpha,~\beta, ~\gamma 각각의 각도는 60^{\circ}, 45^{\circ}, 60^{\circ}가 됩니다.





감사합니다~!
방문해주셔서 감사합니다.
아주 훌륭한 자료입니다 벡터의 이해에 매우 큰 도움이되었습니다
방문해 주시고 칭찬까지 해주셔서 감사합니다. 즐거운 하루 되세요.