Last Updated on 2024-02-19 by BallPen
용수철에 매달린 물체는 단순조화운동을 일으키는 단순조화진동자입니다.
단순조화진동자(Simple Harmonic Oscillator)란 단순조화운동을 일으키는 진동 시스템을 말해요.
여기서 단순조화운동이란 등속원운동을 투영할 때 그 그림자가 만드는 운동임을 이전 글에서 설명드렸습니다.
또한 어떤 물체가 단순조화운동을 하기 위해서는 아래 식으로 주어지는 힘이 물체에 작용해야 한다는 것도 알았어요.
\tag{D1}
F= - kx그렇다면 어떤 진동시스템이 위 식과 같은 힘을 물체에 작용해서 그 물체가 단순조화운동을 하게 만들까요? 결론부터 말씀드리면 가장 대표적인 단순조화진동자 예시는 용수철에 매달린 물체나 단진자 등이 이에 해당합니다.
이번 글에서는 용수철에 매달린 물체에 작용하는 힘이 어떻게 (D1)식을 만족하는지 알아 봐요. 더불어 이번 글을 통해 아래의 식들이 어떻게 도출되는지도 이해할 수 있어요.
\tag{D2}
\begin{align}
&x= A \sin (\omega_0t + \phi_0)\\[7pt]
&m{{d^2x}\over{dt^2}} + kx =0\\[7pt]
&\omega_0 = \sqrt{k \over m}\\[7pt]
&T=2 \pi \sqrt{{m \over k}}\\[7pt]
&f= {1 \over 2\pi}\sqrt{k \over m}\\[7pt]
&x(t) = \sqrt{x_0^2 + {{v_0^2}\over{\omega_0^2}}} \sin\Big(\omega_0t + \tan^{-1}{{\omega_0 x_0}\over{v_0}} \Big)
\end{align}아래는 이번 글의 목차입니다.
Contents
1. 용수철에 매달린 물체
용수철에 매달린 물체를 잡아당겼다가 놓으면 아래 [그림 1]과 같이 진동합니다.
![[그림 1] 용수철에 매달린 물체를 아래로 잡아당겼다 놓으면 위아래로 진동합니다.](https://ballpen.blog/wp-content/uploads/2024/02/Simple_harmonic_oscillator.gif)
이때 물체의 운동을 자세히 보면 속도가 계속 변하는 가속도 운동을 하고 있음을 알 수 있어요.
뉴턴 운동의 제2법칙인 F=ma에 따르면 질량 m인 물체가 가속도 a로 운동하면 그 물체는 힘 F을 받고 있음을 의미합니다.
그렇다면 어떤 형태의 힘이 용수철에 매달린 물체에 작용하는 걸까요? 이제부터 그 힘에 대해 알아봐요.
참고로 용수철에 매달린 물체는 지구에 의해 중력을 받는데요. 지표면 근처에서 그 중력은 물체가 진동하는 동안 항상 일정하게 작용하므로 진동현상과는 관련이 없어요.
즉, [그림 1]에서 보여지는 진동 현상은 중력이 있건 없건 동일하게 일어난다는 의미에요. 그래서 용수철에 매달린 물체에 작용하는 중력은 고려하지 않아도 됩니다..
중력이 아닌 다른 힘의 존재를 상상해 보세요.
1-1. 훅의 법칙
용수철에 매달린 물체에 작용하는 힘의 존재를 알아보기 위해, 아래 [그림 2]와 같이 동일한 용수철에 1m부터 3m까지의 서로 다른 질량의 물체를 매달았다고 생각해봐요.
이때 용수철의 길이, 즉 변위가 어떻게 변하는지 관찰해 봐요. 주의할 것은 용수철을 진동시킨 것이 아니에요. 물체를 매달아 가만히 놓은 상태를 상상해야 합니다.
![[그림 2] 용수철에 서로 다른 질량을 갖는 물체를 매달면 용수철이 늘어나면서 새로운 위치에서 평형을 이룹니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture1-1024x678.jpg)
그림에서 가장 왼쪽 그림은 용수철에 아무런 물체도 매달지 않은 경우에요. 물체가 없으니 용수철은 원래 자연 길이 상태로 있게 됩니다.
즉 용수철이 늘어나지도 압축되지도 않았어요. 이 길이를 원점으로 정하기 위해 용수철 끝점의 위치를 x_0 = 0으로 두겠습니다.
두번째 그림은 용수철에 1m의 물체를 매단 경우에요. 그러면 아래쪽으로 용수철이 늘어나는데요. 이때 무한대로 늘어나는 것이 아니라 변위 x_1에서 평형을 이루고 있음을 보여주고 있어요.
이것은 물체에 작용하는 중력과 반대방향으로 작용하는 어떤 힘이 있음을 뜻해요. 그래서 그 힘과 중력의 크기가 같아지는 위치에서 물체가 평형을 이루는 것이죠. 만일 중력만 존재한다면 물체는 가속되며 떨어질 거에요. 그러면 용수철은 무한대로 늘어나야 합니다.
세번째 그림은 질량 2m의 물체를 매단 경우에요. 그림과 같이 새로운 평형위치 x_2에서 균형을 이루었어요.
같은 방식으로 네번째 그림은 3m의 물체를 매달았으며 새로운 평형위치 x_3에서 균형을 이뤄요.
그러면 중력과 크기가 같은 어떤 힘 F와 용수철의 변위 x 사이의 관계를 알아보기 위해 그래프를 그려보면 아래 [그림 3]과 같아요.
1-2. 탄성력과 용수철상수
![[그림 3] 용수철이 물체에 작용하는 힘의 크기는 늘어난 변위에 비례합니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture2-1024x631.jpg)
그림과 같이 용수철이 물체에 작용하는 힘의 크기 F는 용수철의 변위 x에 비례합니다. 실제 실험을 해보면 저런 결과가 얻어져요. 믿으셔도 좋습니다.
한편 그래프에서 얻어지는 직선의 기울기를 k라 할 때 직선이 원점을 지나므로 직선의 방정식은 F=kx가 될거에요.
여기서 중요한 것은 저 힘 F의 방향은 늘어난 변위 x와는 반대방향이라는 거에요.
여러분들이 용수철을 손으로 압축하여 변위를 만들면 용수철이 펴질려고 하는 힘을 느낄 수 있잖아요. 반대로 용수철을 늘리면 용수철은 수축하려고 하는 힘을 느낄 수 있습니다.
그때 느껴지는 힘이 F에요. 따라서 힘 F와 용수철의 변위 x는 서로 반대 방향을 향하므로 음의 부호를 붙여주어야 해요.
결국 다음의 식을 얻을 수 있고, 이 힘을 탄성력(elastic force), 이 공식을 훅의 법칙(Hooke’s law)이라고 합니다. 그리고 k를 용수철 상수(spring constant)라고 해요.
\tag{1-1}
F= - kx(1-1)식과 같이 탄성력 F의 크기는 변위 x에 비례하며 F의 방향은 x와 반대방향을 향합니다.
그래서 탄성력이 작용하는 물체는 압축되거나 늘어날 때 원래의 위치로 되돌아가려는 성질을 보이게 됩니다.
2. 용수철 단순조화진동자
(1-1)식의 탄성력이 용수철에 매달린 물체에 작용한다는 것을 알았어요. 그런데 그 공식을 잘 보면 단순조화운동을 일으키는 힘인 (D1)식과 같아요.
이 말은 용수철에 매달린 물체의 진동이 단순조화운동임을 의미합니다. 그래서 단순조화운동을 일으키는 이러한 특별한 장치를 우리는 단순조화진동자라고 불러요.
그렇다면 용수철에 매달려 진동하는 물체의 변위는 수학적으로 어떻게 표현될까요? 네 맞아요. 이전 글에서 도출한 단순조화운동의 변위 공식을 그대로 사용하면 됩니다.
\tag{2-1}
x= A\sin(\omega_0 t + \phi_0)여기서 x는 변위이고요. \omega_0는 등속원운동하는 물체의 각속도에요. 그리고 A는 진폭이라고 하는데 물체의 최대 변위입니다. 보통은 물체를 처음 진동시킬 때 평형위치에서 압축하거나 잡아늘린 초기 변위 값에 해당합니다.
그리고 \phi_0는 초기 위상이라고 해요. 이에 대해서는 조금만 더 알아봐요.
2-1. 초기 위상
초기 위상이란 시간 t=0인 순간에 용수철에 매달린 물체의 위상을 뜻합니다. 만일 t=0인 순간에 물체가 x=0인 평형위치를 지나고 있다면 \phi_0=0이 됩니다. 그 이유는 (2-1)식에 t=0을 대입했을 때 x=0이 성립하기 위해서는 \phi_0=0이 되어야 하기 때문이에요.
그리고 t=0인 순간에 물체가 진동의 최상점에 있다면 (2-1)식에 따라 x=A가 성립해야 하므로 \phi_0= {\pi \over 2}가 되어야 합니다.
같은 방식으로 물체가 최상점에서 아래쪽으로 진행하다가 t=0인 순간에 진동의 중심을 지나게 되었다면 x=0이 다시 성립해야 해요. 따라서 이 경우에는 \phi_0=\pi가 되어야 하죠.
아래 [그림 4]는 초기 위상 \phi_0에 따른 단순조화운동의 모양을 나타냅니다. 초기 위상에 따라 진동의 시작 위치가 다르다는 것을 알 수 있어요.
![[그림 4] 단순조화진동자 진동의 초기 위상에 따라 변위-시간 그래프의 시작 위치가 달라집니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture111-1024x273.jpg)
2-2. 각진동수
(2-1)식에서 용수철에 매달려 진동하는 물체의 진폭 A, t=0인 순간의 초기 위상 \phi_0는 진동을 처음 일으키는 주체가 직접 결정할 수 있는 값들이에요.
그렇다면 물체의 각속도 \omega_0는 도대체 어떻게 결정될까요?
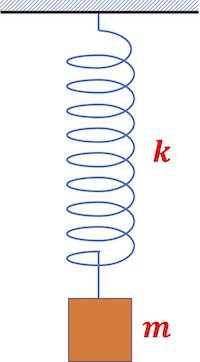
무슨 말이냐면 아래 [그림 5]를 보세요.
![[그림 5] 단순조화진동자](https://ballpen.blog/wp-content/uploads/2024/02/Picture1-1-566x1024.jpg)
[그림 5]는 용수철에 매달린 물체인데요. 위에서 말씀드렸듯이 용수철을 압축하거나 늘린 상태에서 물체를 놓으면 단순조화운동합니다.
그런데 우리가 [그림 5]의 단순조화진동자 시스템에서 알고 있는 값은 단지 용수철 상수 k와 물체의 질량 m뿐이에요. 어디에도 \omega_0와 직접적으로 연관되어 보이는 것은 없어요.
이를 알기 위해서는 탄성력인 (1-1)식과 단순조화운동의 변위에 관한 (2-1)식을 연계해서 풀어볼 필요가 있어요.
우선 (1-1)식의 좌변 F에 뉴턴 운동의 제2법칙을 적용하면 다음과 같이 쓸 수 있어요.
\tag{2-2}
F= ma=- kx여기서 a={{d^2x}\over{dt^2}}로써 변위를 시간으로 두번 미분한 양입니다. 이를 반영하면 다음의 미분방정식이 얻어져요.
\tag{2-3}
m{{d^2x}\over{dt^2}} + kx=0이러한 힘에 관한 방정식을 운동방정식이라고 불러요. 이 운동방정식은 제차 2계 상미분 방정식의 형태인데요.
이 식을 풀면 (2-1)식이 도출되어야 합니다. 왜냐면 (2-3)식에 주어진 미분방정식의 해가 (2-1)식이 되어야 하기 때문이에요.
그런데 정말로 (2-3)식을 풀면 (2-1)식이 나오는지 궁금할 수 있는데요. 이에 대한 풀이 방법은 아래쪽에 별도로 정리하겠습니다.
일단은 (2-3)식의 해가 (2-1)식임을 받아들이시기 바랍니다. 그러면 (2-1)식을 (2-3)식에 대입해봐요. 이를 위해서는 변위 x를 시간으로 두번 미분한 결과가 필요합니다.
\tag{2-4}
\begin{align}
&x= A\sin(\omega_0 t + \phi_0)\\[10pt]
&v={{dx}\over{dt}} = A\omega_0 \cos (\omega_0 t + \phi_0)\\[10pt]
&a = {{d^2x}\over{dt^2}} = -A\omega_0^2 \sin(\omega_0 t + \phi_0)
\end{align}이제 (2-4)식을 (2-3)식에 대입하고 정리하겠습니다.
\tag{2-5}
\begin{align}
&m\Big(-A\omega_0^2\sin(\omega_0 t + \phi_0)\Big)+k\Big(A\sin (\omega_0 t + \phi_0)\Big) = 0\\[10pt]
&\Big(-\omega_0^2+{{k}\over{m}}\Big)A\sin(\omega_0 t + \phi_0) = 0
\end{align}(2-5)식의 두번째 줄에서 A\sin(\omega_0 t + \phi_0)는 변위 x이므로 0이 아니에요. 그러므로 좌변이 0이 되기 위해서는 -\omega_0^2 + {{k}\over{m}}가 0이 되어야만 합니다.
따라서 다음이 성립합니다.
\tag{2-6}
\omega_0 = \sqrt{{k}\over{m}}결국 \omega_0는 용수철 상수 k와 질량 m에 의해 결정된다는 것을 알 수 있습니다.
2-3. 진동 주기
(2-6)식을 이용해 용수철 단순조화진동자의 진동 주기를 구할 수 있어요.
등속원운동하는 물체가 한바퀴 회전하는데 걸리는 시간이 주기 T이고, 이때의 회전 각도는 2 \pi rad입니다.
그러므로 각속도 \omega_0는 다음의 관계가 성립해요.
\tag{2-7}
\omega_0 = {{\Delta \theta}\over{\Delta t}} = {{2\pi}\over{T}}(2-6)식을 (2-7)식에 대입하고 주기 T에 대해 정리하면 다음의 관계가 구해집니다.
\tag{2-8}
T={2\pi}\sqrt{{m}\over{k}}주기 T와 진동수 f는 서로 역수관계이므로 다음의 식도 성립해요.
\tag{2-9}
f= {1 \over {2 \pi}}\sqrt{{k}\over{m}}3. (참고) 용수철 단순조화진동자 운동방정식 풀이
용수철 단순조화진동자의 운동방정식은 (2-3)식과 같아요. 이 식을 아래에 다시 쓸게요.
\tag{3-1}
m{{d^2x}\over{dt^2}} + kx=0이 미분방정식의 좌변와 우변을 m으로 나누고, (2-6)식을 적용하면 다음과 같아요.
\tag{3-2}
\begin{align}
&{{d^2x}\over{dt^2}} + {{k}\over{m}}x = 0 \\[10pt]
&{{d^2x}\over{dt^2}} + \omega_0^2 x = 0\\[10pt]
\end{align}그리고 {{d^2x}\over{dt^2}}=x^{\prime\prime}로 나타내면 다음 (3-3)식처럼 운동방정식을 간단하게 표현할 수 있어요.
\tag{3-3}
\begin{align}
&x^{\prime\prime} + \omega_0^2 x =0
\end{align}3-1. 첫번째 해
(3-3)식 형태의 미분방정식은 앞에서 말씀드렸듯이 제차 2계 상미분방정식이라고 불러요.
2계 미분방정식이므로 해가 두개가 나와야 하는데요. (3-3)식을 잘 보면 자명하게 아래의 식이 그 중 한 해 임을 짐작할 수 있습니다.
\tag{3-4}
x_1(t) = \sin(\omega_0t)정말 그런지 알아볼까요? (3-4)식을 (3-3)식에 대입해봐요. 그러면 아래와 같이 좌변과 우변이 모두 0이 되어 (3-3)식이 성립합니다.
\tag{3-5}
\begin{align}
\Big(-\omega_0^2 \sin(\omega_0t)\Big) + \omega_0^2\Big(\sin(\omega_0t)\Big) =0
\end{align}3-2. 두번째 해
그럼 이제부터 두번째 해를 구하면 되는데요. 제차 2계 상미분 방정식에서 두번째 해를 구하는 계수 낮추기 풀이 방법을 그대로 적용하겠습니다.
두번째 해를 다음의 형태로 가정해봐요.
\tag{3-6}
x_2(t) = u(t)x_1(t)그리고 (3-6)식을 한번 미분하고, 또 한번 미분하면 다음과 같아요. 그런데 시간의 함수임을 뜻하는 기호 (t)는 식이 복잡하니 이제부터 생략할게요.
\tag{3-7}
\begin{align}
&x_2^{\prime} = u^{\prime}x_1 + u x_1^{\prime}\\
&x_2^{\prime\prime} = u^{\prime\prime}x_1 + 2 u^{\prime}x_1^{\prime} + ux_1^{\prime\prime}
\end{align}이제 (3-7)식과 (3-6)식을 원식인 (3-3)식에 대입하고 정리하면 다음과 같아요.
\tag{3-8}
\begin{align}
&(u^{\prime\prime}x_1 + 2 u^{\prime}x_1^{\prime} + ux_1^{\prime\prime}) + \omega_0^{2}ux_1 =0\\[5pt]
&(u^{\prime\prime}x_1 + 2 u^{\prime}x_1^{\prime}) + u ({\color{red}x_1^{\prime\prime } + \omega_0^2 x_1}) = 0
\end{align}윗식에서 빨강색 부분은 원식인 (3-3)식과 같으므로 0입니다. 따라서 위 식이 성립하기 위해서는 좌변 첫번째 항도 0이 되어야 해요.
\tag{3-9}
u^{\prime\prime}x_1 + 2 u^{\prime}x_1^{\prime} =0한편 미분방정식의 한 해인 (3-4)식을 한번 미분하면 다음과 같아요.
\tag{3-10}
\begin{align}
&x_1 = \sin(\omega_0t)\\
&x_1^{\prime} = \omega_0 \cos(\omega_0 t)
\end{align}(3-10)식을 (3-9)식에 대입하세요.
\tag{3-11}
u^{\prime\prime} \sin (\omega_0t) + 2 \omega_0u^{\prime}\cos(\omega_0t)=0미분방정식의 계수를 하나 낮추기 위해 (3-11)식에서 u^{\prime}을 w로 치환하겠습니다. 그러면 (3-11)식은 다음과 같아요.
\tag{3-12}
{{dw}\over{dt}}\sin(\omega_0t) + 2 \omega_0 w\cos(\omega_0 t) =0좌변은 w, 우변은 t와 관련된 것으로 변수분리한 후 양변을 적분해 보세요.
\tag{3-13}
\begin{align}
\int{1 \over w} dw &= -2\omega_0\int{{\cos(\omega_0t)}\over{\sin(\omega_0t)}}dt\\[10pt]
&=-2\omega_0\int \cot(\omega_0t)dt
\end{align}그리고 \cot(\omega_0t) 적분 결과를 반영하면 다음과 같아요.
\tag{3-14}
\begin{align}
\ln|\omega| &= -2 \cancel{\omega_0}{{1}\over{\cancel{\omega_0}}}\ln|\sin(\omega_0t)|+c\\
&=-2\ln|\sin(\omega_0t)|+c
\end{align}양변에 exponential을 취해 주세요.
\tag{3-15}
\begin{align}
\omega &= e^c{e^{\ln|\sin(\omega_0t)|}}^{-2}\\
&=c{{1}\over{\sin^2(\omega_0t)}}
\end{align}윗식에서 e^c는 상수이므로 c로 표기했어요. 그리고 위에서 u^{\prime}을 w로 치환했으니 다시 돌려놓을게요.
\tag{3-16}
\begin{align}
\omega = \color{blue}{{du}\over{dt}} =c{{1}\over{\sin^2(\omega_0t)}}
\end{align}윗식에서 파랑색 부분을 변수분리하고 적분하세요. 이때 \csc^2(\omega_0t) 적분 결과를 적용합니다.
\tag{3-17}
\begin{align}
\int du = u &= c \int {{1}\over{\sin^2(\omega_0t)}}dt\\[10pt]
&=c\Big( -{1 \over \omega_0} \cot (\omega_0 t) + c \Big)\\[10pt]
&=c_1 \cot(\omega_0t)+c_2
\end{align}윗식에서 비로소 u를 구했습니다. 이것을 (3-6)식에 대입하면 바로 두번째 해가 얻어집니다.
\tag{3-18}
\begin{align}
x_2(t) &= u(t)x_1(t)\\
&=\Big(c_1 \cot(\omega_0t)+c_2\Big)\sin(\omega_0t)\\[10pt]
&=c_1 {{\cos(\omega_0t)}\over{\cancel{\sin(\omega_0t)}}} \cancel{\sin(\omega_0t)} + c_2 \sin(\omega_0t)\\[10pt]
&=c_1\cos(\omega_0t)+c_2\sin(\omega_0t)
\end{align}3-3. 일반해
제차 2계 상미분 방정식 해에 대한 중첩의 원리와 선형성 원리를 적용하여 일반해를 최종 도출하면 다음과 같아요.
\tag{3-19}
\begin{align}
x(t)&=c_3x_1(t)+ c_4x_2(t)\\
&=c_3\sin(\omega_0t) + c_4\big(c_1\cos(\omega_0t)+c_2\sin(\omega_0t)\big)\\
&=(c_3+c_2)\sin(\omega_0t)+c_4c_1\cos(\omega_0t)\\
&=c_5\sin(\omega_0t)+c_6\cos(\omega_0t)
\end{align}윗 식이 바로 용수철 단순조화진동자 운동방정식의 일반해입니다. 그런데 저 위에서 단순조화운동의 변위는 (2-1)식처럼 주어진다고 했는데요. 아무리 보아도 (3-19)식은 (2-1)식과는 달라보여요.
이에 대해 잠시만 알아보면 (2-1)식을 아래에 다시 쓰고 삼각함수의 덧셈 정리를 적용하면 다음과 같아요. 여기서 진폭 A와 초기 위상 \phi_0는 상수임을 기억하세요.
\tag{3-20}
\begin{align}
x(t) &= A\sin(\omega_0t + \phi_0)\\
&=A\Big(\sin(\omega_0t)\cos \phi_0 +\cos(\omega_0t)\sin\phi_0 \Big)\\
&={\color{blue}{A\cos\phi_0}}\sin(\omega_0t) + {\color{blue}A\sin\phi_0}\cos(\omega_0t)\\
&=c_5\sin(\omega_0t)+c_6\cos(\omega_0t)
\end{align}윗식에서 파랑색 부분은 그저 상수일 뿐입니다. 따라서 이를 c_5와 c_6로 나타내면 그 결과가 (3-19)식의 마지막 줄과 같아진다는 것을 알 수 있어요.
따라서 용수철 단순조화진동자의 해는 다음과 같습니다.
\tag{3-21}
\begin{align}
x(t) &= A\sin(\omega_0t + \phi_0)\\
\end{align}3-4. 초기 변위, 속도를 이용한 변위식 표현
위에서 이미 미분방정식은 모두 풀었는데요. 조금만 더 고민할게 있어요.
그게 뭐냐면, 용수철 단순조화진동자가 진동할 때 t=0인 순간에 물체의 변위가 x=x_0, v=v_0에 있었다면 (3-21)식에서 진폭 A와 초기 위상 \phi_0는 어떻게 표현되느냐 하는 거에요.
먼저 진폭을 구해볼께요. 이를 위해서는 (3-21)식에 t=0을 대입하고 초기조건을 적용해봐요.
\tag{3-22}
\begin{align}
x(0) &=A\sin(\omega_0 0 + \phi_0)= \color{blue}A\sin\phi_0=x_0\\
\end{align}이번에는 (3-21)식을 미분해서 속도 식을 구해봐요. 그리고 그 식에 t=0을 대입하고 초기조건을 적용해봐요.
\tag{3-23}
\begin{align}
v(0)=A\omega_0\cos(\omega_0 0 + \phi_0) = \color{blue}A\omega_0\cos\phi_0 = v_0
\end{align}(3-22), (3-23)식의 파랑색 부분을 정리하면 다음과 같아요.
\tag{3-24}
\begin{align}
&x_0 = A \sin \phi_0\\[10pt]
&{{v_0}\over{\omega_0}}=A\cos\phi_0
\end{align}위 두식을 제곱해서 서로 합해 봐요. 그러면 다음이 됩니다.
\tag{3-25}
x_0^2 + {{v_0^2}\over{\omega_0^2}} = A^2 \sin^2\phi_0 + A^2 \cos^2 \phi_0 = A^2결국 진폭은 다음과 같이 표현됩니다.
\tag{3-26}
A = \sqrt{x_0^2 + {{v_0^2}\over{\omega_0^2}}}이번에는 초기 위상을 구하는데요. (3-24)의 두 식을 아래와 같이 나누어 보세요.
\tag{3-27}
{{A\sin\phi_0}\over{A\cos\phi_0}} =\tan\phi_0= {{\omega_0 x_0}\over{v_0}}결국 초기 위상은 다음과 같아요.
\tag{3-28}
\phi_0 = \tan^{-1}\Big({{\omega_0 x_0}\over{v_0}}\Big)마지막으로 (3-26)식과 (3-28)식을 (3-21)식에 대입하면 다음과 같습니다.
\tag{3-29}
x(t) = \sqrt{x_0^2 + {{v_0^2}\over{\omega_0^2}}} \sin\Big(\omega_0t + \tan^{-1}{{\omega_0 x_0}\over{v_0}} \Big)지금까지 용수철 단순조화진동자 시스템에 대해 알아봤습니다.