Last Updated on 2024-02-06 by BallPen
측면에서 등속원운동하는 물체에 빛을 비추면 물체의 그림자는 어떤 운동을 할까요?
단순조화운동(SHM, Simple Harmonic Motion)은 등속원운동하는 물체를 투영했을 때 그 그림자가 만드는 왕복운동을 말합니다.
질량 m인 물체가 이 운동을 하기 위해서는 힘 F가 필요한데요. 물체의 변위를 x라 할 때 다음의 관계가 성립해요.
\tag{D1}
\bold{F= - k x}여기서 k는 상수입니다.
이번 글에서는 등속원운동하는 물체를 투영했을 때 나타나는 단순조화운동의 변위, 속도, 가속도를 구하고 위 (D1)식이 어떻게 도출되는지를 설명드립니다.
재미있는 내용이니 편하게 읽어보시기 바랍니다.
아래는 이번 글의 목차입니다.
Contents
1. 등속원운동의 투영
등속원운동하는 물체의 측면에서 빛을 비추면 물체의 그림자가 생깁니다. 이것을 투영한다고 말해요.
이때 투영된 그림자는 어떤 운동을 할까요?
1-1. 등속원운동하는 물체
아래 [그림 1]은 반지름이 A이고 일정한 각속도 \omega_0로 회전하는 원판을 정면과 측면에서 바라본 모습이에요.
이 원판에는 앞으로 튀어나온 손잡이가 있는데요. 그것을 진한 파랑색으로 표현했어요.
![[그림 1] (a) 손잡이가 달린 등속원운동하는 물체의 정면 모습, (b) 측면 모습](https://ballpen.blog/wp-content/uploads/2024/02/Picture99-1024x615.jpg)
이때 이 등속원운동하는 물체의 측면에서 빛을 비춘다면 손잡이 그림자가 벽면에 생길거에요.
그렇다면 그 손잡이 그림자는 어떤 운동을 할까요?
네 맞아요.
원판의 지름 범위인 2A내에서 왔다 갔다하는 왕복운동을 하게 됩니다. 이에 대해 더 알아봐요.
1-2. 단순조화운동
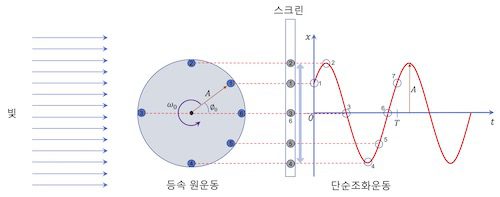
아래 [그림 2]는 등속원운동하는 물체의 측면에 빛을 비추고 손잡이 그림자가 스크린에 만들어지는 모습을 나타내고 있어요.
![[그림 2] 등속원운동하는 물체를 투영하여 만든 단순조화운동](https://ballpen.blog/wp-content/uploads/2024/02/Picture77-1024x404.jpg)
그림과 같이 등속원운동하는 물체의 손잡이가 시간 t=0에서 가로축으로부터 \phi_0만큼 돌아간 위치에 있어요. 그곳이 \textcircled{1}번이에요.
그리고 물체가 일정한 각속도 \omega_0로 회전하고 있어요.
그래서 손잡이는 \textcircled{1} \rightarrow \textcircled{2} \rightarrow \textcircled{3} \rightarrow \textcircled{4} \rightarrow \textcircled{5} \rightarrow \textcircled{6}번 위치를 순차적으로 지나가게 됩니다.
이때 등속원운동하는 물체의 손잡이가 스크린에 맺히는데요.
스크린에 대응시켜놓은 번호처럼 그림자는 중심 축을 기준으로 위쪽으로 물체의 반지름인 A만큼 아래쪽으로는 -A만큼의 범위에서 왕복운동하는 것을 짐작할 수 있어요.
물론 왕복운동하는 그림자는 중심에서 속력이 가장 빠르고 양 끝단에서는 속력이 0이 될거에요. 왜냐하면 양끝단에서는 움직이는 방향을 바꾸어야 하므로 순간적으로 0이되는 지점이 존재할 수 밖에 없어요.
바로 이러한 그림자의 왕복운동을 물리학에서는 단순조화운동(simple harmonic motion) 또는 단순조화진동(단진동)이라고 합니다.
단순조화운동하는 그림자의 운동을 명확히 표현하기 위해 그림과 같이 가로축을 시간 t, 세로축을 변위 x로 하여 그래프가 그려져 있어요.
그래프를 보면 t=0의 \textcircled{1}번 위치에서 시작하여 물체가 한바퀴 돌면 \textcircled{7}번 위치까지 그려지게 됩니다.
바로 이때가 등속원운동하는 물체가 한바퀴 돌아가는데 걸리는 시간인 주기 T가 될거에요.
또 그래프를 잘 보면 싸인꼴 함수 형태로 그래프가 그려진 것을 알 수 있어요. 결국 단순조화운동은 시간의 함수로서 변위가 싸인꼴로 변하게 됩니다.
그럼 이제부터는 단순조화운동을 수학적으로 표현해봐요. 즉 단순조화운동의 변위, 속도, 가속도에 관한 식을 구해보겠습니다.
2. 단순조화운동 변위, 속도, 가속도
위에서 등속원운동하는 물체를 투영하면 그 그림자가 단순조화운동을 한다고 말씀드렸어요. 그래서 단순조화운동의 위치, 속도, 가속도에 관한 공식에는 등속원운동과 관련된 개념들이 사용됩니다.
2-1. 변위
아래 [그림 3]은 각속도 \omega_0로 등속원운동하는 물체를 투영하여 그 그림자가 단순조화운동하는 모습입니다.
이때 기준축으로부터 손잡이 그림자가 있는 곳까지의 거리가 단순조화운동의 변위 x에요.
![[그림 3] 단순조화운동. 단순조화운동의 변위는 등속원운동하는 물체의 위치 벡터를 투영한 것과 같습니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture78-1024x424.jpg)
단순조화운동이 등속원운동하는 물체를 투영해서 얻을 수 있듯이 단순조화운동의 변위 x도 등속원운동하는 물체의 위치 벡터를 투영하면 구할 수 있어요.
[그림 3]을 보면 반지름 A로 등속원운동하는 물체가 각도 \omega_0 t만큼 회전되어 있어요. 이때 투영된 단순조화운동의 변위 x는 그림에 나타낸 것처럼 아래 (1)식으로 구할 수 있습니다.
\tag{1}
\begin{align}
x &= A \sin \theta \\
&= A \sin (\omega_0 t)
\end{align}그리고 (1)식을 그래프로 나타낸 것이 바로 [그림 3]의 오른쪽 그래프입니다. 이때 변위의 최대값인 진폭은 A입니다.
이 그래프위에 그려진 동그란 원은 왼쪽 그림으로부터 투영된 위치를 나타낸거에요.
2-2. 속도
단순조화운동의 변위가 등속원운동하는 물체의 위치 벡터를 투영해서 구할 수 있듯이, 단순조화운동의 속도는 등속원운동하는 물체의 선속도 벡터를 투영하면 구할 수 있어요.
![[그림 4] 단순조화운동. 단순조화운동의 속도는 등속원운동하는 물체의 선속도 벡터를 투영한 것과 같습니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture79-1024x415.jpg)
위 [그림 4]와 같이 등속원운동하는 물체의 선속도는 v_0 = A\omega_0로 주어지므로 이를 스크린에 투영한 단순조화운동의 속도 v는 다음 (2)식과 같이 주어져요.
\tag{2}
\begin{align}
v &= v_0 \cos \theta\\
&=(A \omega_0) \cos(\omega_0 t)
\end{align}그리고 (2)식을 그래프로 나타낸 것이 [그림 4]의 오른쪽에 있는 그래프입니다. 이때 속도의 최대값인 진폭은 A \omega_0입니다.
자칫 그림이 비슷해서 [그림 3]의 변위 그래프와 진폭이 같을 것이라 착각할 수 있는데요. 이것은 속도를 나타내는 그래프이기 때문에 진폭이 다르다는 것에 유념하세요..
이 그래프위에 그려진 동그란 원은 왼쪽 그림의 선속도 벡터를 투영한 속도를 대략적으로 나타낸거에요.
참고로 변위를 시간으로 미분하면 속도를 구할 수 있습니다. 따라서 (1)식의 변위를 시간으로 미분해도 (2)식과 동일한 결론을 얻을 수 있어요.
2-3. 가속도
단순조화운동의 변위와 속도가 등속원운동하는 물체의 위치 벡터와 선속도 벡터를 투영하여 구할 수 있듯이, 단순조화운동의 가속도도 등속원운동하는 물체의 구심가속도 벡터를 투영하면 구할 수 있어요.
![[그림 5] 단순조화운동. 단순조화운동의 가속도는 등속원운동하는 물체의 구심가속도 벡터를 투영한 것과 같습니다.](https://ballpen.blog/wp-content/uploads/2024/02/Picture80-1-1024x401.jpg)
위 [그림 5]와 같이 등속원운동하는 물체의 구심가속도는 a_0 = -A\omega_0^2으로 주어지므로 이를 스크린에 투영한 단순조화운동의 가속도 a는 다음 (3)식과 같습니다.
여기서 가속도에 음의 부호가 붙는 이유는 [그림 3], [그림 4]에 그려진 단순조화운동의 위치, 속도벡터와 반대방향을 향하기 때문이에요.
또한 투영되는 각도는 [그림 5]에서와 같이 \theta가 아닌 \gamma이고, 삼각형 내각의 합은 \theta + \gamma+{{\pi}\over{2}}={\pi}의 관계가 성립됩니다.
\tag{3}
\begin{align}
a &= a_0 \cos \gamma\\
&=-(A \omega_0^2) \cos \big(\pi - {{\pi}\over{2}} - \theta \big)\\
&=-(A \omega_0^2) \cos \big({{\pi}\over{2}} - \theta \big)\\
&=-(A \omega_0^2)\big(\cos{{\pi}\over{2}}\cos \theta + \sin{{\pi}\over{2}}\sin \theta \big)\\
&=-(A\omega_0^2) \sin \theta\\
&=-(A\omega_0^2)\sin(\omega_0 t)\\
\end{align}전개 과정에서 삼각함수 덧셈정리가 적용되었습니다.
(3)식을 그래프로 나타낸 것이 [그림 5]의 오른쪽에 있는 그래프입니다. 이때 가속도의 최대값인 진폭은 A \omega_0^2입니다.
그래프위에 그려진 동그란 원은 왼쪽 그림의 구심가속도 벡터를 투영한 가속도를 대략적으로 나타낸거에요.
참고로 속도를 시간으로 미분하면 가속도를 구할 수 있습니다. 따라서 (2)식의 속도를 시간으로 미분해도 (3)식과 동일한 결론을 얻을 수 있습니다.
3. 단순조화운동을 일으키는 힘
지금까지 단순조화운동은 등속원운동하는 물체를 투영해서 구할 수 있다고 했습니다. 그리고 단순조화운동의 변위, 속도, 가속도 공식을 유도했어요.
그렇다면 이번에는 단순조화운동을 일으키기 위한 힘의 요건까지 확장해봐요.
만일 질량 m인 물체가 단순조화운동을 하고 있다면 그 물체에 작용하는 힘은 어떻게 표현될까요? 바꾸어 말하면 정지된 물체에 어떠한 형태의 힘이 작용해야 단순조화운동과 동일한 왕복운동을 하게 될까요?
이를 구하기 위해서는 뉴턴 운동의 제2법칙인 F=ma을 적용하면 되는데요. 이때 가속도 a는 (3)식을 대입합니다.
\tag{4}
\begin{align}
F&= ma\\
&=m(-A\omega_0^2 \sin (\omega_0 t))\\
&=-(m\omega_0^2A)\sin(\omega_0 t)
\end{align}그런데 (4)식에서 m,~\omega_0는 모두 상수에요. 그래서 m\omega_0^2을 k로 치환하면 다음과 같아요.
\tag{5}
\begin{align}
F&=-(m\omega_0^2A)\sin(\omega_0 t)\\
&=-kA\sin(\omega_0 t)\\
\end{align}그리고 (5)식에서 A \sin (\omega_0 t)가 있는데요. 이것은 (1)식에 주어진 물체의 변위 x와 같아요.
이를 반영하면 단순조화운동에 필요한 힘 F는 다음과 같이 아주 간단하게 정리될 수 있어요.
\tag{6}
F = - k x결국 질량 m인 물체에 작용하는 힘 F가 (6)식처럼 변위의 크기 x에 비례하되 변위의 반대방향으로 작용한다면 물체는 단순조화운동을 하게 됩니다.